CrashMaster
Member
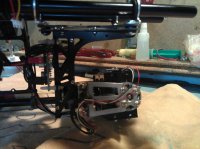
The top plate holes are:What is the distance between de two holes (with the gromets) in the top plate (exactly!)? Maybe it fits on my landing gear from quadframe.
Front holes 85mm
Back holes 28mm
Front to back 80mm
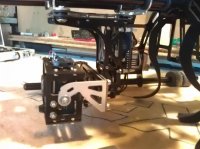
The mounting Plates - ie. the aluminium one centre to centre are 70mm the tubes which go through them are 10mm
The distance between the two aluminium mounts is 87mm but are mounted with three bolts and could be turned to make the gap either 80mm if one turned or 73mm if both were turned.
Mine is slightly different to the one shown on Rob's website http://www.aeroxcraft.com/images/brushless1.jpg. I don't know if that is because I have the silicone as oppose to the standard rubber. However, here is mine below.
View attachment 12151 View attachment 12152 View attachment 12158 View attachment 12161
The last one is a cat trying to see what is happening. Cute little stray made her home here only 6 weeks ago.