Bartman
Welcome to MultiRotorForums.com!!
Everything's done and ready to fly. Small stuff like LED's and balancing props can be done Sunday evening if Monday's trip is still a go.
The rain persisted this evening up to and through the Cub Scout meeting so I'm expecting to do a first flight first thing tomorrow morning. Once it's done I'll post the video and the thread will swap back to the Movi M5 review.
Here are a few more pics of the build and a video of the first full voltage power-up.
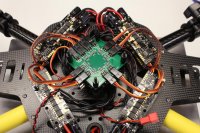
This pic shows the final runs of the motor and power wires. When attaching the motor wires to the MK BL's you have to resist the urge to use too much solder as it ends up letting too much heat get into the FET's which are the electronic devices that switch the power to the motors on and off a gazillion times a second. If they damaged by too much heat during the assembly process then it's just a matter of time before they will burn up and maybe cause a lot of damage.
View attachment 18219
The next two pics show the wires I attach to make the flight controller do its thing. There are a bunch of different ways to do this and if you're using a Mikrokopter power distribution board then most of the wires can be replaced by a five wire cable with molex connectors. With the I2c isolator board I've got to have the power wires and the C/D channel wires run as separate cables and I use the power wires as I do because that's just what I'm used to doing. The Spektrum diversity board is another standard thing for my builds since I'm still using my JR9503 although Jeti or Graupner (I think) are better options at this point for Mikrokopter because they integrate into the MK system and provide telemetry readouts (and voice call outs from the radio).
View attachment 18221View attachment 18220
The last photo is the I2c isolator board I've mentioned a few times. It's not available anymore but it works well and makes wiring up the BL's (speed controllers) a lot easier, especially when they're mounted individually.
View attachment 18222
Here's the first power up, where the rubber meets the road, full voltage, let the chips fall where they may, time to $hit or get off the pot, what separates the men from the boys.........um.....you get the point.......if you make it past this without smoke or I2c errors then you're doing pretty well and should stop and celebrate your good fortune with the adult beverage and companionship of your choosing.")
The rain persisted this evening up to and through the Cub Scout meeting so I'm expecting to do a first flight first thing tomorrow morning. Once it's done I'll post the video and the thread will swap back to the Movi M5 review.
Here are a few more pics of the build and a video of the first full voltage power-up.
This pic shows the final runs of the motor and power wires. When attaching the motor wires to the MK BL's you have to resist the urge to use too much solder as it ends up letting too much heat get into the FET's which are the electronic devices that switch the power to the motors on and off a gazillion times a second. If they damaged by too much heat during the assembly process then it's just a matter of time before they will burn up and maybe cause a lot of damage.
View attachment 18219
The next two pics show the wires I attach to make the flight controller do its thing. There are a bunch of different ways to do this and if you're using a Mikrokopter power distribution board then most of the wires can be replaced by a five wire cable with molex connectors. With the I2c isolator board I've got to have the power wires and the C/D channel wires run as separate cables and I use the power wires as I do because that's just what I'm used to doing. The Spektrum diversity board is another standard thing for my builds since I'm still using my JR9503 although Jeti or Graupner (I think) are better options at this point for Mikrokopter because they integrate into the MK system and provide telemetry readouts (and voice call outs from the radio).
View attachment 18221View attachment 18220
The last photo is the I2c isolator board I've mentioned a few times. It's not available anymore but it works well and makes wiring up the BL's (speed controllers) a lot easier, especially when they're mounted individually.
View attachment 18222
Here's the first power up, where the rubber meets the road, full voltage, let the chips fall where they may, time to $hit or get off the pot, what separates the men from the boys.........um.....you get the point.......if you make it past this without smoke or I2c errors then you're doing pretty well and should stop and celebrate your good fortune with the adult beverage and companionship of your choosing.
Attachments



Last edited by a moderator:

