You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
first build thread: lessons and learning to follow...
- Thread starter Motopreserve
- Start date
Motopreserve
Drone Enthusiast
Wait, did Dennis Rodman fly in that thing???
")
Motopreserve
Drone Enthusiast
So I got my 2nd prop balancer in the mail the other day, the friction based DuBro. Put it together rather easily, but recognized that the base is not perfectly level. A little disappointing based on the rest of the build quality - which is solid, but not that big of a deal. A couple business cards under 1 side leveled it out based on my cheapie level I have laying around the office. No way it would stand up to my Starrett machinist level...
The other thing that is new is the order I had placed for the APC props. This was the first batch of "good" props that I have bought - and instantly you notice the difference between these and the Hobby King cheap ones, and even the GenFan [fairly] cheap ones. The APC are much more solid, weigh more and the difference in quality is noticeable to the touch. Nice ot have something decent to wok with - and I hoped for much better luck while balancing.

But even better props are still in need of balance. Sometimes, a bunch of balance. One thing that I notice with the new DuBro aluminum stops, compared to the TopFlite plastic ones is that they are noticeably bigger diameter. This at first seems to be a plus (and maybe it still is), but it can create some issues when trying to apply CA or even while sanding. Guess who glued the stop to the prop the first time out when the CA ran a little bit????
Overall, I like the feel of this balancer better. Although the magnetic seems to be a more perfect, friction=free method of balancing something as delicate and touchy as these small props, it's nice to have a more solid build, and a frame that inspires confidence, unlike the TopFlite.
The APC Multirotor model props get a thumbs up for quality too - although I have not been able to fly them except for the 2 minutes prior to the last crash. They are definitley heavier, meaning it will take a bit more for the motor to throw these around. We will see if that effects flight time or characteristics once I'm again airborne...
The other thing that is new is the order I had placed for the APC props. This was the first batch of "good" props that I have bought - and instantly you notice the difference between these and the Hobby King cheap ones, and even the GenFan [fairly] cheap ones. The APC are much more solid, weigh more and the difference in quality is noticeable to the touch. Nice ot have something decent to wok with - and I hoped for much better luck while balancing.

But even better props are still in need of balance. Sometimes, a bunch of balance. One thing that I notice with the new DuBro aluminum stops, compared to the TopFlite plastic ones is that they are noticeably bigger diameter. This at first seems to be a plus (and maybe it still is), but it can create some issues when trying to apply CA or even while sanding. Guess who glued the stop to the prop the first time out when the CA ran a little bit????
Overall, I like the feel of this balancer better. Although the magnetic seems to be a more perfect, friction=free method of balancing something as delicate and touchy as these small props, it's nice to have a more solid build, and a frame that inspires confidence, unlike the TopFlite.
The APC Multirotor model props get a thumbs up for quality too - although I have not been able to fly them except for the 2 minutes prior to the last crash. They are definitley heavier, meaning it will take a bit more for the motor to throw these around. We will see if that effects flight time or characteristics once I'm again airborne...
Last edited by a moderator:
Motopreserve
Drone Enthusiast
Got a chance to do a quick mock-up of some aluminum stops for the TopFlite balancer using the old South Bend lathe. I am really liking the DuBro better at this point, but I might as well have the TopFlite in proper working order. Had a bit of aluminum laying around, and although I just rushed through the setup and didn't make them pretty, it looks like these could work. I'll probably do a nicer set, with better measurements - and then make a couple extras for those of you who I've spoken to about this issue.
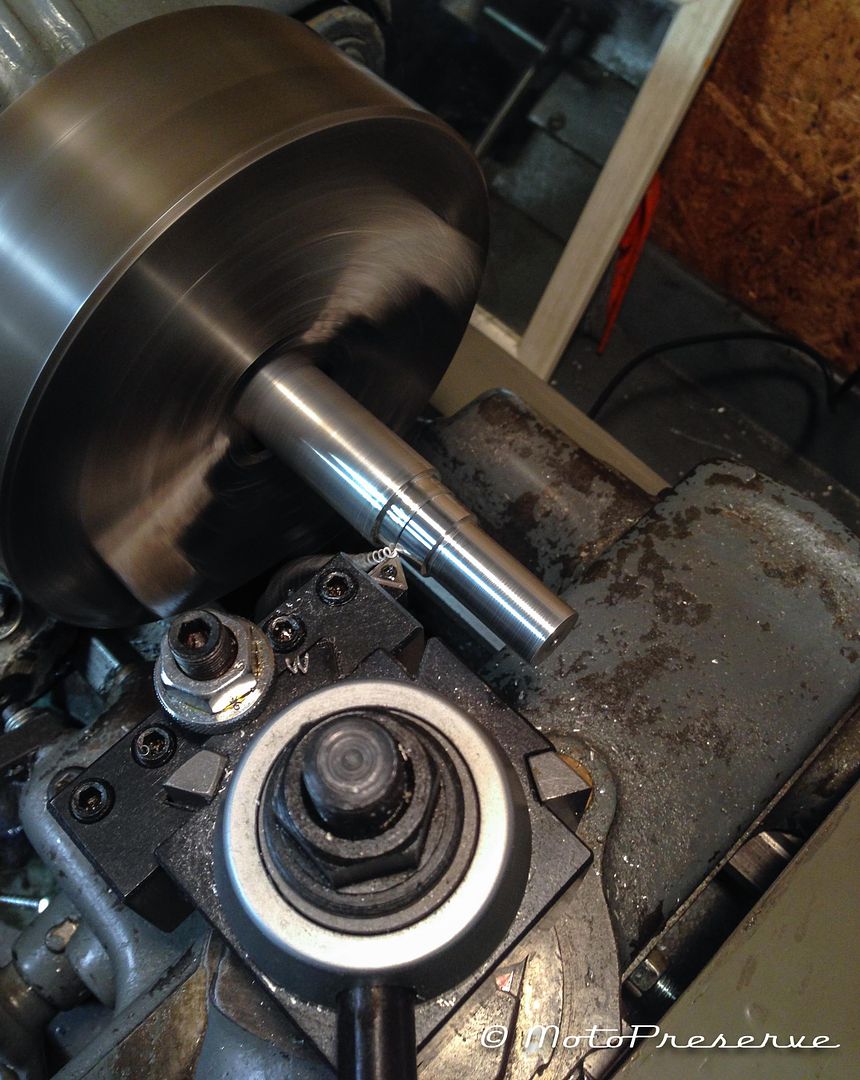
The only issue I think there might be is the fact that a cleanly drilled 1/8" hole in aluminum, which is the size of the shaft, doesn't offer the same type of "sticktion" that the plastic stops did. Meaning it doesn't hold itself to the shaft in the same way, keeping the prop held tight. The original stops were probably drilled slightly under 1/8" - but I think I can get around this by making a small silicon tube/sheath, and possibly even the spring like the Dubro has, which will hold the stops nice and tight.


The only issue I think there might be is the fact that a cleanly drilled 1/8" hole in aluminum, which is the size of the shaft, doesn't offer the same type of "sticktion" that the plastic stops did. Meaning it doesn't hold itself to the shaft in the same way, keeping the prop held tight. The original stops were probably drilled slightly under 1/8" - but I think I can get around this by making a small silicon tube/sheath, and possibly even the spring like the Dubro has, which will hold the stops nice and tight.

Motopreserve
Drone Enthusiast
I thought the same thing. I may try that first. I was thinking that the oil should be able to find its way evenly around the shaft. The one reason to try the silicone rubber is that the Dubro stops feel MUCH better and tighter on the shaft/props than the TopFlite ever did.
Work in progress...
Work in progress...
coreyperez
Member
It’s almost embarrassing…
Well, after many, many, MANY hours of troubleshooting, rewiring, internet searching I’ve finally got the Honey Badger (KK2.1) flying.
Tonight, she came all apart (motors were the only thing that remained). I re-wired (removed all but the signal wires (excluding the #1 motor) and same with the RX. Still… Aerobatics 101.
Back to the internet, kept searching and everything kept saying one of two things: ESC wires were wrong (checked mine no fewer than 6 times (even this evening ALONE)) or a gyro was bad. Luckily for me I’ve got x2 more KK2.1’s on hand. So, I figured, I’d had enough of this I’m going to fix this once and for all. So, off came the top plate and I started unplugging the ESCs… AGAIN.
Um…. How did I do that?
There is NO WAY I screwed up the wiring for the ESCs this whole time, I’ve checked, checked, checked again, and then re-checked. But yep. I did. It all started with the #1 motor and worked progressively wrong.
IN MY DEFENSE… This layout makes the most sense to me. But I cut my teeth on DJI and their unconventional method of motor-layout madness and somehow looked beyond the picture and formulated some made up scheme in my head. It didn’t fly. Literally. Basically, it is the same trap we all fall through at some time. We are so sure of our work that we glance over and (air quoting here) “Double Check” our work. I TRULY have done this while working on this KK2.1 problem 6 times this evening ALONE! Not even considering the past 10+ days…
Short of it… Read the flippin instructions… (AND FOLLOW THEM)
NOW.. The tuning starts. This thing wobbles all OVER the place! (Me trying to fly it in a 8x6 “open area” in my room). I know, I know… Its 12:30am here Saturday Morning. I’m going to bed.
Corey
Well, after many, many, MANY hours of troubleshooting, rewiring, internet searching I’ve finally got the Honey Badger (KK2.1) flying.
Tonight, she came all apart (motors were the only thing that remained). I re-wired (removed all but the signal wires (excluding the #1 motor) and same with the RX. Still… Aerobatics 101.
Back to the internet, kept searching and everything kept saying one of two things: ESC wires were wrong (checked mine no fewer than 6 times (even this evening ALONE)) or a gyro was bad. Luckily for me I’ve got x2 more KK2.1’s on hand. So, I figured, I’d had enough of this I’m going to fix this once and for all. So, off came the top plate and I started unplugging the ESCs… AGAIN.
Um…. How did I do that?
There is NO WAY I screwed up the wiring for the ESCs this whole time, I’ve checked, checked, checked again, and then re-checked. But yep. I did. It all started with the #1 motor and worked progressively wrong.
IN MY DEFENSE… This layout makes the most sense to me. But I cut my teeth on DJI and their unconventional method of motor-layout madness and somehow looked beyond the picture and formulated some made up scheme in my head. It didn’t fly. Literally. Basically, it is the same trap we all fall through at some time. We are so sure of our work that we glance over and (air quoting here) “Double Check” our work. I TRULY have done this while working on this KK2.1 problem 6 times this evening ALONE! Not even considering the past 10+ days…
Short of it… Read the flippin instructions… (AND FOLLOW THEM)
NOW.. The tuning starts. This thing wobbles all OVER the place! (Me trying to fly it in a 8x6 “open area” in my room). I know, I know… Its 12:30am here Saturday Morning. I’m going to bed.
Corey
Motopreserve
Drone Enthusiast
Corey,
im not sure I followed what was wrong??? Did you have the motors spinning the wrong direction? Or mounted in the wrong configuration???
im not sure I followed what was wrong??? Did you have the motors spinning the wrong direction? Or mounted in the wrong configuration???
Motopreserve
Drone Enthusiast
Aha. At least you figured it out!!!
Motopreserve
Drone Enthusiast
Isn't there a diagram? I thought all quad-X were set up the same, but finally realized my mini is set up exactly opposite of my large multirotor.
coreyperez
Member
The SHORT short answer is, I had the ESCs in the wrong order.
Building the DJI first (CCW) direction with the ESCs I applied that method of ordering with the KK2.1 board. So, even though I checked numerous times. My brain applied “muscle memory” (if you will) and accepted the wrong order as “correct” without actually doing it.
I ensured I had the correct rotation and blades on, but all in all, I had the wrong order of ESCs. #1 included. So, without actually double checking, I probably had them ALL wrong. Kind of explains when it kept flipping to the left, I gave it FULL right, it kept flipping left.
Photo below. (edit) Sorry. Just noticed photo looks like crap. DJI: #1 is top right, going CCW, KK2.1: #1 is top left, going CW (Motor Placement on arms, not referring to actual motor rotation).
OOPs…
Corey
Building the DJI first (CCW) direction with the ESCs I applied that method of ordering with the KK2.1 board. So, even though I checked numerous times. My brain applied “muscle memory” (if you will) and accepted the wrong order as “correct” without actually doing it.
I ensured I had the correct rotation and blades on, but all in all, I had the wrong order of ESCs. #1 included. So, without actually double checking, I probably had them ALL wrong. Kind of explains when it kept flipping to the left, I gave it FULL right, it kept flipping left.
Photo below. (edit) Sorry. Just noticed photo looks like crap. DJI: #1 is top right, going CCW, KK2.1: #1 is top left, going CW (Motor Placement on arms, not referring to actual motor rotation).
OOPs…
Corey
Attachments

Last edited by a moderator:
coreyperez
Member
I can't get this thing to stop the high speed oscillations now. I've even gone as far as turning the P gains down to 30.
I'm doing some UH60 studying right now while the battery is charging (I PROBABLY should have had a low voltage alarm on the balance connector). Luckily no puffy battery syndrome and it balanced it again.
I've noticed the KK send more sensitive to bumps into the ground. if I do bump into the ground I have to throttle completely down and let the propellers stop before starting again or the next takeoff is a disaster, usually resulting in immediate excessive high-speed oscillations and progressively gets worse (more rapidly than normal). Videos (watching) and tuning this afternoon....
Corey
I'm doing some UH60 studying right now while the battery is charging (I PROBABLY should have had a low voltage alarm on the balance connector). Luckily no puffy battery syndrome and it balanced it again.
I've noticed the KK send more sensitive to bumps into the ground. if I do bump into the ground I have to throttle completely down and let the propellers stop before starting again or the next takeoff is a disaster, usually resulting in immediate excessive high-speed oscillations and progressively gets worse (more rapidly than normal). Videos (watching) and tuning this afternoon....
Corey
Motopreserve
Drone Enthusiast
Have you found some PID setting examples from people with a similar quad??? Might be worth it as a starting point.
Not sure why hitting the ground would change the settings. Might want to make sure you restart the battery/quad on level ground after a crash /hard landing.
Not sure why hitting the ground would change the settings. Might want to make sure you restart the battery/quad on level ground after a crash /hard landing.
Crisp image
Member
Maybe the bump on the ground upsets the gyros or something an by stopping everything it gives it time to resetHave you found some PID setting examples from people with a similar quad??? Might be worth it as a starting point.
Not sure why hitting the ground would change the settings. Might want to make sure you restart the battery/quad on level ground after a crash /hard landing.
Regards
Crispy
Motopreserve
Drone Enthusiast
Not out of the question - but that really shouldn't be happening. A hard reset with a battery power-up may help the situation - but that is definitely indicative of some other issue. It almost seems like the PID settings are being thrown off by vibration (crash). That's not good.