Well, I'm getting pretty spooked by my SuperX.
Went out for a little tuning of the g knob after running through the complete radio setup to be sure I didn't miss something. Between rain drops and gusts was able to get two short flights in, neither really good benchmarks for improvement. First flight lasted about 2 minutes, enough time to make a few adjustments and then plug into my PC to see where the g knob was percentage wise, was looking to get to around 50-60% as many have specified to be a good point of reference. Log shows I started at 52%, went as low as 0 then back up to 52. I was trying to see the difference in stability over a wide spectrum gains on the + side since most of my other tunings have been on the - side.
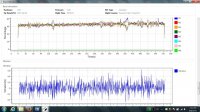
After landing and looking at the logs I took off again, this time I deployed the retracts to get them up underneath. No real issuses until about the one minute mark. I was just messing with the g knob went all of a sudden the hex shot up like I hit the throttle. I lowered to throttle and got it back down then landed it without incident. Looking at the logs I noticed there is a power surge around that time. First time I ever experienced anything like that, I was afraid the thing was going to take off to a much greater height but it responded to the throttle input and I was able to land. The machine seemed to be pretty stable when I got it back down but I have had enough for one day.
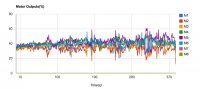
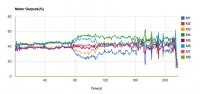
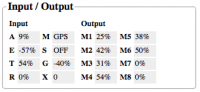
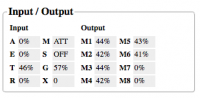
Strange how the logs show the 1,3,5 motors all have about the same output % and are about 5-10 points below the 2,4,6 motors. Right now I have No-Confidence in my setup and frustrated to the point I'm going to bench it until I can figure out what is going on.
Here's the latest log, with the power surge in the report.
http://log.xaircraft.cn/#2015_06_09_014054.100_93.2.01.15
")