Macsgrafs
Active Member
Hey Bart,
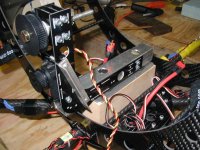
I noticed both + and - loops of your power harness are connected (complete circle). I was informed a while back that this can cause noise in the power lines. The best way to eliminate the noise is to not have the negative complete the circle. On one of my hexa's I had it make a complete circle and never had a problem, but from there on I have never had the negative form a complete circle. It may not be an issue for you but thought I would pass the knowledge on that was bestowed upon me from some folks who know about electricity.
Looking good!
Best,
Shawn
Shawn, how does the MK power loop thing work, surely both thier power rails are a loop?
Ross