Ok, testing went well today - after 4 tries to get a sat lock - sweating bullets before getting started. That pushed my time envelop to a shorter flight than hoped but I did get in about 7:20. I set the gains to default, 1.1 on roll, pitch and yaw and .9 on height. I thought I had set the g nob back to 0% at mid-point by adjusting my sub-trim servo back but looking at the black box info it is at -16% at mid-point. Guess I have to figure that adjustment out. It sounded better on launch than it has any other time testing. It gave me confidence to fly a little more aggressively in GPS and Atti modes.
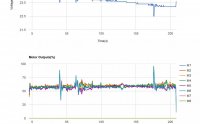
I tried to level #1 & 4 motors better but after looking at the flight report I think they could be worse. Output levels are further apart than before and much higher voltage but that could be attributed to the more aggressive flight. Vibe level seems to be better even under FF flight. Rain on the way for the next 3-4 days so testing will have to wait 'til next week. I was surprised at the graphs, thought they would be better than they are but I could be reading them wrong.
In regard to flying. I have been flying in GPS because I didn't feel comfortable with the inconsistent hover but plan to fly more Atti once I think I'm on the right path. Taking longer than I had hoped to tune this puppy but making head way.
Latest log -
http://log.xaircraft.com/#2015_08_19_192813.500_133.1.07.20
")