With the ribbon cable, which of the connections do i need?
There are 4 different wiring options on andreas website, Im unsure which one is best?
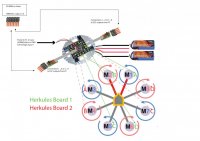
I know that m1,2,5,6 plug into one of the micromatch connections and m3,4,7,8 to the other. But on his website it talks about there being 8 connections to each of those micromatch plugs. Do I use the ground cable?
It shows things like I2C_SCL, I2C_SDA, VAUX(I know this one has something to do with power, lol) and of course the GND.
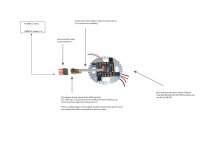
Say im using two batteries, then through the graupner air module and then through the emcotec switch do i only need to feed power to one set of the herk cables not both? Do you think soldering all four cables to the emcotec switch would help spread the load, or would it not be needed?
Cheers for the explaination and the image, helps so much.
")