I've been flying a Phantom 2 for a while now and realized a few months back that a generic platform like that is great to learn with but has its limitations. So. I've spent all summer reading and trying to get smart enough for this build - my first.
A little about my flying: This is an AP platform for a GoPro, and my main subject is foxhunting. It's a beautiful sport that I've been photographing for a while (http://adrianjennings.zenfolio.com/portfolio) and my few snippets of aerial video at the end of last season caused quite the stir in the community: http://vimeo.com/89873549.
So, the goal here is to build a platform to do a lot better than the Phantom which has two main limitations for me: noise, and short flight time. The noise is obvious: although none of the horses or hounds seem to take the slightest bit of notice, obviously I want to be as discreet as I can. In terms of flight time, I often need to hover over a covert as the hounds are cast for 10 minutes or so and I need to have plenty of juice left to stay on the hounds when they are gone away. The last thing I need is range of operation, and the ability to get my radio signals (up and down) through trees.
My hand-wringing came in terms of balancing duration with the ability to operate in potentially strong winds. That's what held me up for a long time until I had a brainwave that I really hope pans out!!
So here's the plan:
Frame: Tarot 650 Ironman. I thought long and hard about the planform and in the end settled on a quad. I wanted to invest in a high end drive system and I realized that going to a hex or a quad would quickly stress my budget and have me buying lower quality components. Also, it's just a GoPro! I didn't want to drop $1k+ in drive components to lift a $300 camera!
Motors: KDE 4014XF 380kV. Like I said, I wanted to go big on drive quality and I loved what I've been reading about KDE (especially Patrick's dedication to providing great support). I decided on these motors since they could work at the voltages and prop sizes I selected.
ESCs: KDEXF UAS35. Again, I just like what I hear about KDE. Also, I'm a beginner so buying ESCs matched to the motors was a big deal for me.
AP: DJI Naza M V2. I've had a great experience with my Phantom so I have no reason to change this.
Gimbal: DJI H3-3D. Same deal - I love this gimbal and have had a great experience with is so far.
Radio: Immersion RC EzUHF. I've been running this on my Phantom for a while and I love it - should give me the range and foliage penetration I'm looking for.
FPV: 900MHz Hobby Wireless downlink and DJI iOSD Mini. 900MHz for range and foliage penetration (yes, working on that HAM license now).
Telemetry: Immersion RC Tiny Telemetry. This gives me real-time GPS location streamed to my iPad and battery voltage and current consumption.
On the ground: Futaba 14SG (already using that with the Phantom and you'd have to pry it from my cold dead hands if you wanted to take it from me!!). Plus the usual stuff: screen, DVR etc. The DVR gives me playback of the Tiny Telemetry data should the worst happen and I have to go find my quad....
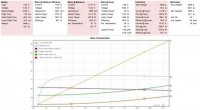
OK, so here's the dual mode part. I realized that for endurance I need larger, slower spinning props, but in the wind I'll need the added maneuverability of smaller props at higher RPMs. So, I decided to use two different battery/prop combos to get the best of both worlds on the same basic platform:
Endurance Configuration:
Batteries: 2x Multistar 4S 10A
Props: T-Motor 17x5.8 Carbon.
In eCalc that gives me 32+ mins at 54% hover and about 5000 RPM. Here's the stats:

Performance Configuration:
Batteries: 2x Multistar 6S 5.2A
Props: T-Motor 14x4.8 Carbon
eCalc says 22+ mins at 44% hover and 7500 RPM:

If that doesn't quite do it I can go to 8S and 12" props. The big challenge now is going to be finding AP gains that will work for both setups, or a simple way to switch gains - not sure about that yet.
First pic:

I'm a bit stalled now waiting on some parts: I've ordered another center plate to make another layer. The ESCs are going on top here with another plate over them to carry all the electronics and battery up top. It took some messing to get the KDEs to work with the stock 650 mounts but I got it sorted and it's a solid and tidy fit now. I'll post some more pictures when I get it built up some more.
I'm pretty excited! This build has been a long time in the ponder-stage so it's good to be strapping it together") I have quite a bit invested in this so I freaking hope it flies well!
I have quite a bit invested in this so I freaking hope it flies well!
A little about my flying: This is an AP platform for a GoPro, and my main subject is foxhunting. It's a beautiful sport that I've been photographing for a while (http://adrianjennings.zenfolio.com/portfolio) and my few snippets of aerial video at the end of last season caused quite the stir in the community: http://vimeo.com/89873549.
So, the goal here is to build a platform to do a lot better than the Phantom which has two main limitations for me: noise, and short flight time. The noise is obvious: although none of the horses or hounds seem to take the slightest bit of notice, obviously I want to be as discreet as I can. In terms of flight time, I often need to hover over a covert as the hounds are cast for 10 minutes or so and I need to have plenty of juice left to stay on the hounds when they are gone away. The last thing I need is range of operation, and the ability to get my radio signals (up and down) through trees.
My hand-wringing came in terms of balancing duration with the ability to operate in potentially strong winds. That's what held me up for a long time until I had a brainwave that I really hope pans out!!
So here's the plan:
Frame: Tarot 650 Ironman. I thought long and hard about the planform and in the end settled on a quad. I wanted to invest in a high end drive system and I realized that going to a hex or a quad would quickly stress my budget and have me buying lower quality components. Also, it's just a GoPro! I didn't want to drop $1k+ in drive components to lift a $300 camera!
Motors: KDE 4014XF 380kV. Like I said, I wanted to go big on drive quality and I loved what I've been reading about KDE (especially Patrick's dedication to providing great support). I decided on these motors since they could work at the voltages and prop sizes I selected.
ESCs: KDEXF UAS35. Again, I just like what I hear about KDE. Also, I'm a beginner so buying ESCs matched to the motors was a big deal for me.
AP: DJI Naza M V2. I've had a great experience with my Phantom so I have no reason to change this.
Gimbal: DJI H3-3D. Same deal - I love this gimbal and have had a great experience with is so far.
Radio: Immersion RC EzUHF. I've been running this on my Phantom for a while and I love it - should give me the range and foliage penetration I'm looking for.
FPV: 900MHz Hobby Wireless downlink and DJI iOSD Mini. 900MHz for range and foliage penetration (yes, working on that HAM license now).
Telemetry: Immersion RC Tiny Telemetry. This gives me real-time GPS location streamed to my iPad and battery voltage and current consumption.
On the ground: Futaba 14SG (already using that with the Phantom and you'd have to pry it from my cold dead hands if you wanted to take it from me!!). Plus the usual stuff: screen, DVR etc. The DVR gives me playback of the Tiny Telemetry data should the worst happen and I have to go find my quad....
OK, so here's the dual mode part. I realized that for endurance I need larger, slower spinning props, but in the wind I'll need the added maneuverability of smaller props at higher RPMs. So, I decided to use two different battery/prop combos to get the best of both worlds on the same basic platform:
Endurance Configuration:
Batteries: 2x Multistar 4S 10A
Props: T-Motor 17x5.8 Carbon.
In eCalc that gives me 32+ mins at 54% hover and about 5000 RPM. Here's the stats:
Performance Configuration:
Batteries: 2x Multistar 6S 5.2A
Props: T-Motor 14x4.8 Carbon
eCalc says 22+ mins at 44% hover and 7500 RPM:
If that doesn't quite do it I can go to 8S and 12" props. The big challenge now is going to be finding AP gains that will work for both setups, or a simple way to switch gains - not sure about that yet.
First pic:
I'm a bit stalled now waiting on some parts: I've ordered another center plate to make another layer. The ESCs are going on top here with another plate over them to carry all the electronics and battery up top. It took some messing to get the KDEs to work with the stock 650 mounts but I got it sorted and it's a solid and tidy fit now. I'll post some more pictures when I get it built up some more.
I'm pretty excited! This build has been a long time in the ponder-stage so it's good to be strapping it together
I have quite a bit invested in this so I freaking hope it flies well!