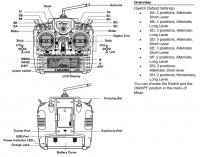
Sorry! Been struggling to make progress with too much business travel :-\ I have the 4S/17" config pretty much dialed-in now - I put the Naza gains on a couple of dials on my Futaba and did some flying in a pretty stiff wind. It's flying really nicely and I was very impressed with how it handled the gusts with those large props. I have it set up to be smooth and steady in this mode - not too responsive for some calm AP.
I'll struggle to do much with it this week because of travel again, but I'll try to post an update at the weekend. Jobs remaining:
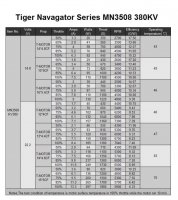
- 6S/14" Gains
- Speed test in both configs
- Get camera position finalized and cut rails
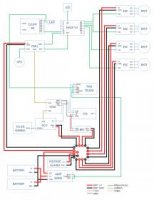
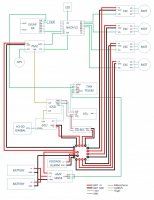
- Solder dual battery adapter (I've been flying with both batteries mounted but only a single connected for now while I figure out how I want to do the Y connector)
- Get the Naza battery limits finalized - they're kicking in a bit early right now
Once I've figure out how to edit my original post I'll get everything written up there.
As for the frame, I bought it from Hobby King - good price and fast delivery (well, relatively fast).
")