I moved this thread to the MRC build threads section as I believe I'm ready to proceed (Thanks for the kick in the butt Mr. Droider!) and intend to document it as a full blown beginning to end Mikrokopter build done ala' carte which just means I'm going to overanalyze every piece for your reading enjoyment before buying anything and will forego the usual Mikrokopter route of buying a complete kit.
@ Fox, some of the camera mounts have the gear built into them, and since I haven't determined which mount I'm going to use, I can't say for sure which landing gear I'll end up with. I really like the flexible gear that Droider has on his quad so I could very well end up with something like that. I've also considered using composite rod with balls on the ends to give flexibility and protection from snags...but I'm getting ahead of myself!
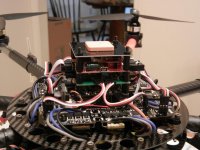
First off, the BRAINS OF THE BIRD, or Bird Brains if you will (Bird Brains!! ha

ha
ha
ha
ha
) . Mikrokopter, without a doubt. Next question, do I have the fine people at Quadrocopter.us (or NGhobbies.com FWIW) solder my boards for me or do I venture into new territory and do it myself (you can't hear it but my knees are shaking at the thought). I am here for your amusement and to set a good example so I think I'll solder my own.
To complete the bird's brain I'll also need the NAVI board and GPS so I'll see about ordering them at the same time.
Motors and ESC's???!!! Motors probably won't be MK because I want to expand my knowledge base and understand what my other options are. ESC's may or may not be Mikrokopter. MK motor controllers are expensive and the board leaves them very firmly implanted within the copter structure. I could use the MK controllers but without the neat power distribution ring. That would slenderize my electronics stack and putting the ESC's on the exterior of the central frame would make them easier to change and in a better position to dissipate (two s's in dissipate, who knew?) heat.
Frame will very likely be the Droidworx AD-8HL. There's also an AD-8HLE but I don't know what the extra E on the end stands for. I like the simplicity of the tube arms and stout structure but I'm not sure if I'll need the gear or not so I'll leave the final decision for another day. I've got to find me some pennies so I can order the boards and get this adventure started. I also happened to start another project last night that will lead us to a board mascot of sorts but it will take months to do and so I'll leave it a mystery for now.
Thanks for reading.........to the Bartcave!