Emowillcox
Member
HI guys got all my stuff mounted and starting to test. Bare with me this is my first build and i’m not familiar with alot of the terms so I might have something obvious going on here. When I try to lift off it rolls hard to the right and I’m not sure why. I’ll post my set up thanks for your time.
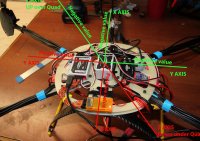
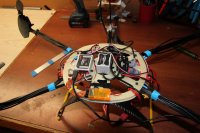
First photo is my wookong set up as a X quad and the front is facing us or towards the bottom of the photo.
2nd photo is my page 1 on software
I went with IMU facing forward
3rd photo
have quad x mode
4th photo
my tx monitor.. here was a little tricky...
It said if I move aileron slider left that should be left and right should be right.. well when i took quad out it was backwards.. so I hit reverse servo on my radio.. still did not fly so recalibrate with software and then same exact problem.. maybe I have IMU set wrong .. should it make a difference if I just reverse the aileron servo in my radio?
Photo 5 just shows when I move aileron stick right the slider went left
photo 6
this is where I put my control mode switch set to a 3 position stick on my DX 7 Spectrum radio. When I have stick all the way down it goes to M and makes it blue, but when I go middle position on the switch on the radio the slider goes to the A but it stays gray and says fail -safe at bottom right of screen on software... the when I go all the way up on the switch on the radio to the 3rd position the slider on the computer software goes to the GPS but it stays grey and in the bottom right part of the screen it says fail safe again.
next questions would be about auto pilot, gimbal, and voltage... I did not set any of these up yet.. Do I have to have those set up in order to fly?
Thanks for the time helping a Rookie!
View attachment 1318View attachment 1319View attachment 1320View attachment 1321View attachment 1322
First photo is my wookong set up as a X quad and the front is facing us or towards the bottom of the photo.
2nd photo is my page 1 on software
I went with IMU facing forward
3rd photo
have quad x mode
4th photo
my tx monitor.. here was a little tricky...
It said if I move aileron slider left that should be left and right should be right.. well when i took quad out it was backwards.. so I hit reverse servo on my radio.. still did not fly so recalibrate with software and then same exact problem.. maybe I have IMU set wrong .. should it make a difference if I just reverse the aileron servo in my radio?
Photo 5 just shows when I move aileron stick right the slider went left
photo 6
this is where I put my control mode switch set to a 3 position stick on my DX 7 Spectrum radio. When I have stick all the way down it goes to M and makes it blue, but when I go middle position on the switch on the radio the slider goes to the A but it stays gray and says fail -safe at bottom right of screen on software... the when I go all the way up on the switch on the radio to the 3rd position the slider on the computer software goes to the GPS but it stays grey and in the bottom right part of the screen it says fail safe again.
next questions would be about auto pilot, gimbal, and voltage... I did not set any of these up yet.. Do I have to have those set up in order to fly?
Thanks for the time helping a Rookie!
View attachment 1318View attachment 1319View attachment 1320View attachment 1321View attachment 1322




")