matwelli
Member
Revisited the Y4 tonite , reconfigured my minsoo kim quad into a tri, and used the landing gear and motor adaptors from my frame design, and whiped up a Y4
First test is per std Y4 accepted practice, equal props and motors , and as last time, it stunk.
Rear motor speed is set to 62% of the front
The problem is, you only have the rear motors for yaw control, and couple to the fact when all 4 motors are identical, the rear props need to run at 1/2 the thrust of the front props, you get weak yaw, couple with pitching forward whenever you yaw (as the rear props start to bite teh air and make lift)
So, the answer (so far anyway) is, to put smaller props on the back
Im running 10 by 4.5 on front and 8 by 4 on the rear, all motors are flycam 925's
The secret is running the rears at 83% of the front speed, easily done with copter control
will shoot some vid tomorrow
test hop tonite was in the kitchen, about 4ft square by 10 ft high space (with two curious cats hanging around)
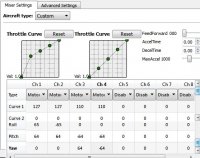
Custom mix
(note 127 is 100%)
motor 1 front left
Curve = 127 (throttle)
Roll= 64
Pitch =64
Yaw =0 (none
motor 2 front right
Curve = 127
Roll= -64
Pitch =64
Yaw =0
motor 3 rear CW
Curve = 105 (83% of front)
Roll= 0
Pitch = -64
Yaw = -127
motor 4 rear CCW
Curve = 105
Roll= 0
Pitch = -64
Yaw = 127
Im also running the pitch gain about 1.4 times as high as roll to help combat any pitching with yaw
First test is per std Y4 accepted practice, equal props and motors , and as last time, it stunk.
Rear motor speed is set to 62% of the front
The problem is, you only have the rear motors for yaw control, and couple to the fact when all 4 motors are identical, the rear props need to run at 1/2 the thrust of the front props, you get weak yaw, couple with pitching forward whenever you yaw (as the rear props start to bite teh air and make lift)
So, the answer (so far anyway) is, to put smaller props on the back
Im running 10 by 4.5 on front and 8 by 4 on the rear, all motors are flycam 925's
The secret is running the rears at 83% of the front speed, easily done with copter control
will shoot some vid tomorrow
test hop tonite was in the kitchen, about 4ft square by 10 ft high space (with two curious cats hanging around)
Custom mix
(note 127 is 100%)
motor 1 front left
Curve = 127 (throttle)
Roll= 64
Pitch =64
Yaw =0 (none
motor 2 front right
Curve = 127
Roll= -64
Pitch =64
Yaw =0
motor 3 rear CW
Curve = 105 (83% of front)
Roll= 0
Pitch = -64
Yaw = -127
motor 4 rear CCW
Curve = 105
Roll= 0
Pitch = -64
Yaw = 127
Im also running the pitch gain about 1.4 times as high as roll to help combat any pitching with yaw



")