Very nice build! I really like the simplicity of the design and how clean it looks. Do you mind posting the weight of the setup?
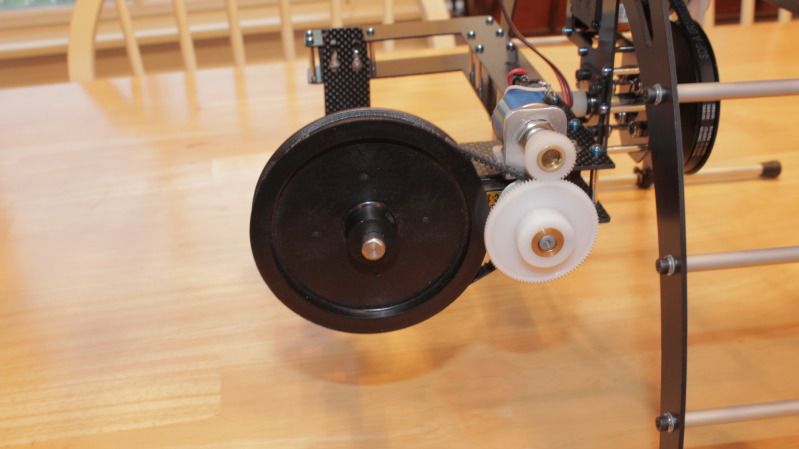
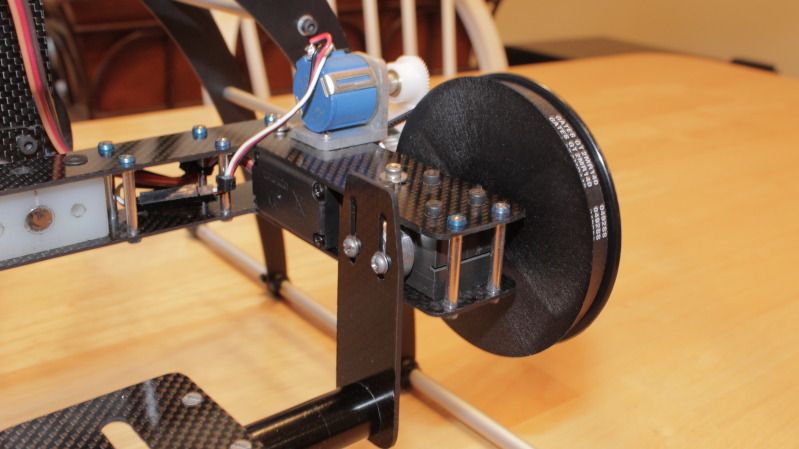
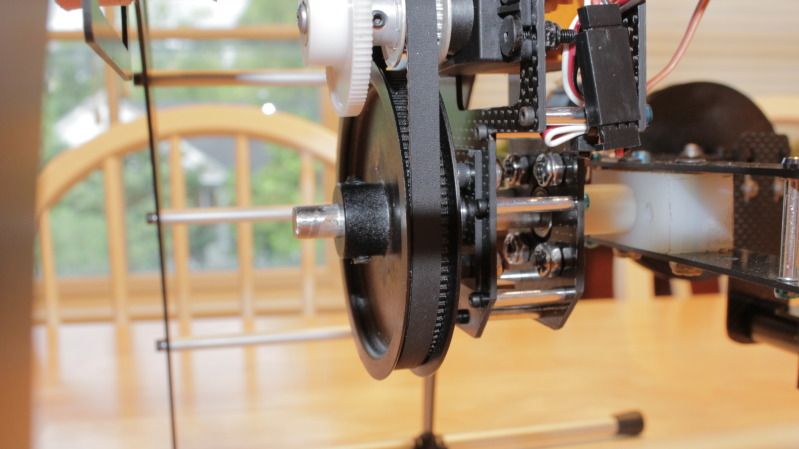
I am considering getting one of Askman's new AG700 gimbals when they come out, and you guys share a lot of design features. I must say though that the CF really looks a lot stiffer than the G10 they use. Can you talk a bit to why you decided to go with the higher gear ratios? From the testing I have seen for the AG550, it really likes the 2.5:1 to 2.8:1 ratios with the fast MKS servos they use. You gain smoothness with higher gear ratios but loose a bit of speed for reactions, which makes smooth flying more necessary. They are realliy trying for platform independence, where you don't need to fly smoothly to get smooth results. I am still in debate about what's better.
Also, I have heard and seen video of the Sony DSC-HX9V. It can do decent video if you absolutely have no vibe issues. It's a jello machine otherwise. Again, third hand info, but I thought that i would pass it along
")
Great work again! Looking forward to flight video.