You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
CS8 to X8 conversion - Herkules ESC III V3
- Thread starter BorisS
- Start date
BorisS
Drone Enthusiast
Anyone using herkules setup in hexa/wkm setup succesfully?
Shouldnt Be a Problem only that you waste two ESC Units. But since WKm seems to jitter on f1 f2 Ports and for a hexa you are only using M1....M6 should work better on a hexa than on a octo.
Boris
redridinghood
Member
I posted on rcgroups about the wkm F1-F2 jitter and Timecop said that he saw no jitter when he tested his a while ago.
If there is a problem with the two outputs why do we have reports of succesfull flying with simonk flashed esc's?
If there is a problem with the two outputs why do we have reports of succesfull flying with simonk flashed esc's?
BorisS
Drone Enthusiast
I posted on rcgroups about the wkm F1-F2 jitter and Timecop said that he saw no jitter when he tested his a while ago.
If there is a problem with the two outputs why do we have reports of succesfull flying with simonk flashed esc's?
I doubt that Andreas would be lying about it. How Simonk FW filters and how the herkules filter I don't know. How many use Simonks FW ESCs on an Octo I also don't know. What timecop really tested concerning F1 and F2 i also don't know. All i know is that I directed the question concerning the jitters on F1 and F2 towards DJI and they replied they will get back to me, and I know that Lars also tested f1 and f2 with normal servos stating that he noticed a response time difference.
Can you direct me towards TC answer to the question maybe i can add something to the dicusiion to make it more specific or read something out of TCs answer
")
Boris
Taycuphach
Member
Hi Boris,
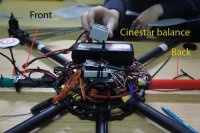
I now done with the wiring and setting up my Futaba 8 and sb6028 with Cinestar8 however I just can't fly because when I start the motor the Cinestar will pitch/nick backward strongly and make the cinestar to turn up side down
I have checked my wiring: ESC to MC, RX to MC; spinning of motors; propellers set up; and my TX channel however everything is fine and execute correctly.
I myself think that if the motor has spinned correctly, the cinestar must balance and if it is not in my case, it must related to the setting of channel in my TX so I tried to reverse the elevator channel in my TX several times however the problem still persists. I notice that only when I push the elevator stick forward to maximum the cinestar front & back boom will balance with each other and if I move the IMU and make it tilt back, cinestar will balance
Have you got similar experience and what was your solution ? Am I right to conclude that this is due to the wrong calculation of COG ? or it is just the wrong setting in TX ?
Before I post the question, I have spent hours and keep searching in the forum to find out the problem however may be I not type the right key word or my knowledge on this field is limited so I would like to seek support from you guys.
I am really looking forward to hearing from you.
Cuong
View attachment 3315View attachment 3316
I now done with the wiring and setting up my Futaba 8 and sb6028 with Cinestar8 however I just can't fly because when I start the motor the Cinestar will pitch/nick backward strongly and make the cinestar to turn up side down
I have checked my wiring: ESC to MC, RX to MC; spinning of motors; propellers set up; and my TX channel however everything is fine and execute correctly.
I myself think that if the motor has spinned correctly, the cinestar must balance and if it is not in my case, it must related to the setting of channel in my TX so I tried to reverse the elevator channel in my TX several times however the problem still persists. I notice that only when I push the elevator stick forward to maximum the cinestar front & back boom will balance with each other and if I move the IMU and make it tilt back, cinestar will balance
Have you got similar experience and what was your solution ? Am I right to conclude that this is due to the wrong calculation of COG ? or it is just the wrong setting in TX ?
Before I post the question, I have spent hours and keep searching in the forum to find out the problem however may be I not type the right key word or my knowledge on this field is limited so I would like to seek support from you guys.
I am really looking forward to hearing from you.
Cuong
View attachment 3315View attachment 3316
Attachments

Last edited by a moderator:
Taycuphach
Member
I have remounted the IMU to center and recalculated the COG however it still does not solve my problem. The cinestar still nick backward
Last edited by a moderator:
jetforce
FLY HIGH AND STAY HIGH
I have remounted the IMU to center and recalculated the COG however it still does not solve my problem. The cinestar still nick backward
@ Taycuphach,
post your total setup which ESC, motor, ect.
Also some screen-shot of your WKM-assistant.
Muunk had similar problems, iit was his ESC`s : http://www.multirotorforums.com/showthread.php?1862-New-Octo-very-unstable
Taycuphach
Member
Hi All,
Thanks to Munk topic, I have rechecked my ESC and divided it into 2 batchs (4 ESCs each batch), then I assembly each part to Cinestar to make a quadrocopter. Then I start the motor to see whether the problem still there ? The first batch, the problem still persist; the second batch, it has all gone and cinestar excecute correctly.
It must be the ESCs that makes my cinestar unbalance
Thanks alot for your support, it makes my life more easier)
Cheers,
Cuong
Thanks to Munk topic, I have rechecked my ESC and divided it into 2 batchs (4 ESCs each batch), then I assembly each part to Cinestar to make a quadrocopter. Then I start the motor to see whether the problem still there ? The first batch, the problem still persist; the second batch, it has all gone and cinestar excecute correctly.
It must be the ESCs that makes my cinestar unbalance
Thanks alot for your support, it makes my life more easier
)Cheers,
Cuong
BorisS
Drone Enthusiast
Okay got some APC 13 x 4 E props gonna test them in the next couple days. Hope to get a stable bird and some longer flight times with them !
View attachment 3489
View attachment 3489
Attachments

redridinghood
Member
Boris I got some APC 13x4 too. Don't like them at all. Almost double the weight of my JXF 14x4.
redridinghood
Member
Boris the CF 12x3.8 will work great on the CX.
http://www.foxtechfpv.com/1238-carbon-fiber-propeller-cwccw-p-446.html
http://www.foxtechfpv.com/1238-carbon-fiber-propeller-cwccw-p-446.html
BorisS
Drone Enthusiast
nah I am fine i know i am on the safe side with the 11 x 5 graupners or with the 12 3.8 Cf from the MK shop 11 grams. I just wanted to squeeze some more flight time out with the 13 x 4. But the 12x 3.8 you just posted look interesting since they are only 2 grams heavier and cheaper than the 12 x 3.8 from the MK shop !
Boris
Boris
BorisS
Drone Enthusiast
I am also very tempted to try these http://www.aerobot.com.au/shop/all-products/51-aerobot-13x65-carbon-fiber-propeller-set-v2.html
13 gram for a 13 Cf prop is the lightest i have seen up to now !
although i had bad expierences with the 12 3.8 version he is selling.
Boris
13 gram for a 13 Cf prop is the lightest i have seen up to now !
although i had bad expierences with the 12 3.8 version he is selling.
Boris
redridinghood
Member
Boris is this the CX?
http://vimeo.com/38076210
Wow very stable, can you give some info on the build?
http://vimeo.com/38076210
Wow very stable, can you give some info on the build?