You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Neills DIY Gimbal Design
- Thread starter BIGTACO
- Start date
Progress update:
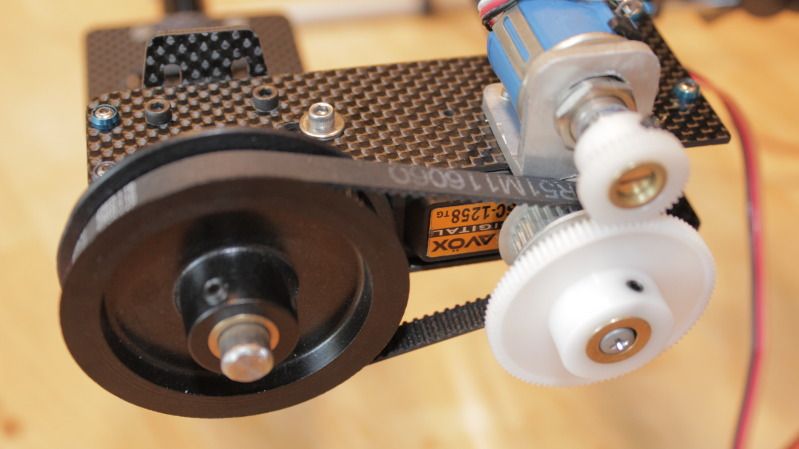
I got the servos modified to add my external pots + clipped of the travel stops to allow for 360 degrees rotation. Installed both pots in location on the gimbal. I am still waiting for my roll assembly pot gears plus my new ratio pulleys and belts for both roll and tilt. In the meantime I used my existing parts to go ahead and do some simple function testing of the tilt servo/pot assembly. For the test I used an old FM TX/RX I had. RX running off 6 volts. This test doesn't exibit full travel of the servo. When I hook the servo up to the hoverfly gimbal controller I'll be able to open up travel. Once my new ratios are installed I'll be getting 120 degrees total travel (90 down and 30 up). The results of the test are better than I had hoped. I was worried about runout of the pot gearing. I am using 64 pitch gears so any runout could be a big problem. With runout in mind I chose gearing with a high quality rating. They are molded and then machined. Shaft OD and ID tolerancing also was chosen with low runout in mind. Runout turned out to be negligible. Servo positioning resolution looks really great so far. Cannot wait to see what will happen with a proper gimbal controller and my new ratios.
Next will be roll testing.
Here is a video of the test.
http://www.youtube.com/watch?v=Mm6W-QwaOYw
I got the servos modified to add my external pots + clipped of the travel stops to allow for 360 degrees rotation. Installed both pots in location on the gimbal. I am still waiting for my roll assembly pot gears plus my new ratio pulleys and belts for both roll and tilt. In the meantime I used my existing parts to go ahead and do some simple function testing of the tilt servo/pot assembly. For the test I used an old FM TX/RX I had. RX running off 6 volts. This test doesn't exibit full travel of the servo. When I hook the servo up to the hoverfly gimbal controller I'll be able to open up travel. Once my new ratios are installed I'll be getting 120 degrees total travel (90 down and 30 up). The results of the test are better than I had hoped. I was worried about runout of the pot gearing. I am using 64 pitch gears so any runout could be a big problem. With runout in mind I chose gearing with a high quality rating. They are molded and then machined. Shaft OD and ID tolerancing also was chosen with low runout in mind. Runout turned out to be negligible. Servo positioning resolution looks really great so far. Cannot wait to see what will happen with a proper gimbal controller and my new ratios.
Next will be roll testing.
Here is a video of the test.
http://www.youtube.com/watch?v=Mm6W-QwaOYw
I'll take that $64k question with the following answer:
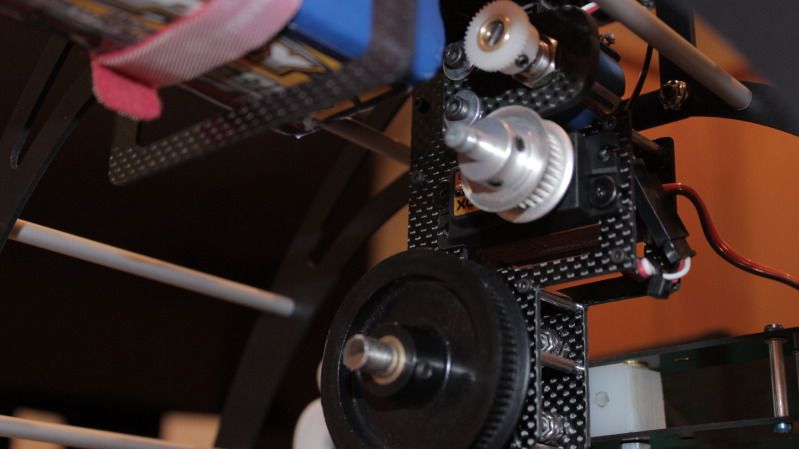
I cannot feel any play in the camera tray at all. Along bearing rotational axis or radially. I am very pleased about that. Its very solid. The only play I get is backlash in the internal servo gears. I showed my wife but she just said "Neill, I love you. You are such a nerd". haha
The real test will be in flight. This assemblies shortcummings will be flushed out then.
I cannot feel any play in the camera tray at all. Along bearing rotational axis or radially. I am very pleased about that. Its very solid. The only play I get is backlash in the internal servo gears. I showed my wife but she just said "Neill, I love you. You are such a nerd". haha
The real test will be in flight. This assemblies shortcummings will be flushed out then.
Looking good! So... the $64K question: is there any play at the camera plate, in any direction?
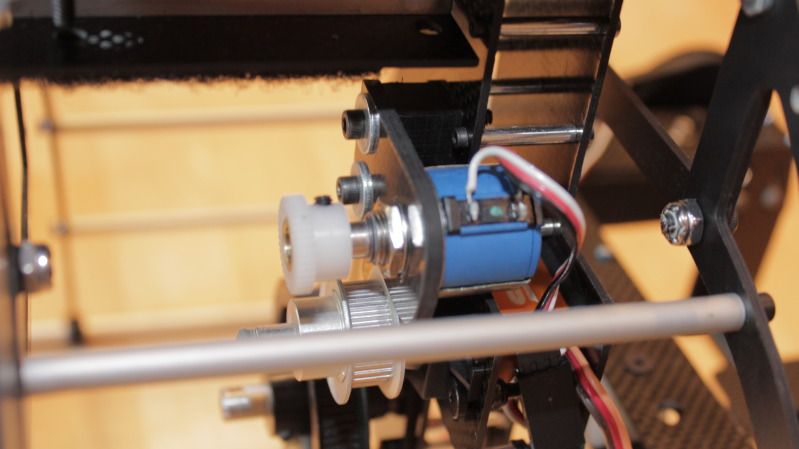
My gimbal is basically complete. I did some (non-flight) testing with my buddy's Nex-5n this weekend. Just moved the gimbal/F550 around using my hands to see how it reacts while recording. Had the servos plugged into gimbal outputs on my Naza controller. So far the results looks very promising even using this Naza to control it. I will not know for sure how this gimbal will perform until I get a proper controller so this morning I ordered the hoverfly board! They are backordered till August 20 though. Once I get my board all setup I will post up video of flight testing.
And that, unfortunately, is going to be the limiting factor. We've seen attempts to mask that backlash with rotary dampers, linear dampers, springs and even felt washers (Photohigher). Let's hope the thoroughness of the rest of your engineering limits its effects on the end result. Nice work, indeed!The only play I get is backlash in the internal servo gears.
R_Lefebvre
Arducopter Developer
Jes, have you ever seen any actual test results from antagonistic servo pairs?
Yes, sure, I've had it working on a test rig - and Denny has successfully used the technique too. It works, of that there's no doubt. I found that certain servos are not as happy doing it as others. The Hitec 7990, for example, really didn't like it.
Google up US Patents 5,729,100 and 3,803,935
Google up US Patents 5,729,100 and 3,803,935
Good intro to some anti-backlash solutions: https://e-reports-ext.llnl.gov/pdf/222804.pdf (including antagonistic drive).
Yes. I agree. To resolve backlash as well as other negatives to using servos, I feel direct drive motors (Zenmuse) is really the way to go. Reduces the mechanical complexity a great deal. Using servos is sort of like a rube goldberg project by the time you are done adding extra gear to resolve the servo's inherant deficiencies. Really a typical servo that most gimbals today use aren't designed with this application in mind. So you have to do a bunch of jumping through hoops to mod them to fit the application. And even after all that they still aren't ideal. DJI took the right approach with their new gimbal. I imagine the other big manufacturers (Photohigher) will follow.
And that, unfortunately, is going to be the limiting factor. We've seen attempts to mask that backlash with rotary dampers, linear dampers, springs and even felt washers (Photohigher). Let's hope the thoroughness of the rest of your engineering limits its effects on the end result. Nice work, indeed!
Last edited by a moderator:
R_Lefebvre
Arducopter Developer
Yes. I agree. To resolve backlash as well as other negatives to using servos, I feel direct drive motors (Zenmuse) is really the way to go. Reduces the mechanical complexity a great deal. Using servos is sort of like a rube goldberg project by the time you are done adding extra gear to resolve the servo's inherant deficiencies. Really a typical servo that most gimbals today use aren't designed with this application in mind. So you have to do a bunch of jumping through hoops to mod them to fit the application. And even after all that they still aren't ideal. DJI took the right approach with their new gimbal. I imagine the other big manufacturers (Photohigher) will follow.
I don't know that I agree that servos weren't designed for this. I mean, think about where they are used. Tail control on a heli is a great example. They have a huge amount of back-and forth movements and they need to be ultra-precise. So obviously servo makers want to eliminate backlash. I think the problem is there are just too many gearsets and they just can't get rid of the tolerance stackup for a price we can afford.
But I think the difference here is that heli applications load the servo in a single direction, the pushrod is generally pushing against one side of the backlash. But the gimbal application, it's not a constant force load, but an inertial load, and it's constantly jittering around center. That's what makes the jitter show up.
Has anybody tried a single servo, with a spring pushing against it? Either a clockspring on the axis, or maybe a spring-damper. It will mean the servo is always working, but maybe solve the problem?
I also think one of the problems with the gimbal makers is they use cheap servos. Just as an example, the PS1 3X Pro v2 seems to come with... well I'm not even sure what they are. "Parallax" servos, which appear to be modified Futabas, but I'm not even sure what they're based on because they are weaker than an S148? $13 servos on a $1600 gimbal. The upgrade to Savox 1258TG's isn't priced too unfairly given they have to be modified for CR. But I'm surprised they even sell the gimbal with the cheap ones. And even the 1258's aren't that great.
Not like 7990's, those things are monsters.
So what did they do in the antagonistic install? I think analogs would actually be better at this than digitals, since they're softer around center. With digitals, you probably need some torsional softness on one of them so they don't fight too hard.
Yes - the 7990's were "brutal" and refused to be calmed, even when you dialled down their speed. And they were limit cycling like crazy because their angular backlash is greater than one "position" of the magnetic encoder. This is the other side of the RC servo problem - their response (loosely: their gain) is not "tunable".
R_Lefebvre
Arducopter Developer
Yes - the 7990's were "brutal" and refused to be calmed, even when you dialled down their speed. And they were limit cycling like crazy because their angular backlash is greater than one "position" of the magnetic encoder. This is the other side of the RC servo problem - their response (loosely: their gain) is not "tunable".
You felt the encoder had "positions"? Hmmm... I wouldn't have expected that.
") - are we talking about the same thing?
- are we talking about the same thing?R_Lefebvre
Arducopter Developer
Maybe I misunderstood what you're trying to say.
In my effort to minimize backlash in the gear train of a servo I bought some Multiplex servos with Karbonite gear (should be relabeled Hitec servos) and they have no backlash at all, running much smoother than the Savöx I had earlier, too. Not fully satisfied with them, though, as I found some problems on my gimbal (on which the roll mechanism is directly connected to a servo arm) in either the resolution of the servo, its ability to hold a position or some kind of feedback with a Picloc gimbal controller I had (and now sold). It surely can be attributed to the design of my gimbal and with a belt pulley mechanism they should be perfectly okay.

Large family!
Yes, she is a girl. Charli Elyssa Whiteley
Yes, she is a girl. Charli Elyssa Whiteley
Congratulations! A girl? I have a full house... Alvin, 6, Molly, 5, and Nelli, 5 months