You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
XAircraft Super X on TBS Discovery
- Thread starter RTRyder
- Start date
SleepyC
www.AirHeadMedia.com
I tried it on my XY8 and that was the one rig the SuperX did not like.
Seems like it did not like the squished configuration. It flew but had oscillations.
Drew sent me the following diagram to try, but I had to use the system on another rig, so i put my HFP back on teh XY8 so i could just fly it.
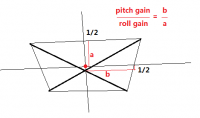
He also said the Xaircraft engineers recommended the following: They recommend having a smaller pitch gain than roll gain in the software using the formula in the photo.
View attachment 14221
Seems like it did not like the squished configuration. It flew but had oscillations.
Drew sent me the following diagram to try, but I had to use the system on another rig, so i put my HFP back on teh XY8 so i could just fly it.
He also said the Xaircraft engineers recommended the following: They recommend having a smaller pitch gain than roll gain in the software using the formula in the photo.
View attachment 14221
Attachments
Hoverfly never did mention their big release did they? not to change subject.
They mentioned their own brushless gimbal and the fact they were moving or had moved to a much larger base. There was something else but I forget right now.
I have a 650-V8 I'd like to drop another SuperX into, it will require the PRO version to handle that configuration. Or I can get rid of the 8 motors and SC's, upgrade to 4 larger motors and SC's, and save some money by not needing the Pro version,but rather running the "Basic" SuperX model instead....I think there's about a $200.00 difference.
If I do that my Version 2 FC1212-P, AHRS-S, Compass, and GPS/Auto Pilot will go up for sale.
If I do that my Version 2 FC1212-P, AHRS-S, Compass, and GPS/Auto Pilot will go up for sale.
jfro
Aerial Fun
OK, I've made a hit list of my equipment that I'm going to sell and gonna try a Super X. Thinking of going all in and putting it on my xy8 instead of my small quad which is flying extremely well with Naza M v2/ gps, tarot/gopro 3. If I could set exposure control on the GO Pro, I wouldn't be throwing more money at my XY8.
Since it seems to be a question mark as to how good it may work on the XY8 config, I'm wondering if I should convert it to a standard x8. My preferred camera on this is a GH2 or GH3 and usually not shooting ultra wide. Prob 35mm equivilent with 14mm lens on miicro 4/3rds. I've nerver had a prop in anything on my XY8 config.
I could put the Naza V2 / gps on the XY8 and save $200 dollars , but I'd reallly like the XY8 to be my money shot machine with the larger cameras.
Can anyone tell me or quess how long my arms have to be (or how far apart motors have to be) on an x8 to keep 12" props out of the frame (35mm ish). Currently, my llens is just a little forward of the center of the Aircraft and down about 6-8" below the bottom prop? I'm just on a 2 axis gimbal right now, so don't have to worry about anything other than straight ahead... I currently don't do any fast forward flying so that helps a bit.
Since it seems to be a question mark as to how good it may work on the XY8 config, I'm wondering if I should convert it to a standard x8. My preferred camera on this is a GH2 or GH3 and usually not shooting ultra wide. Prob 35mm equivilent with 14mm lens on miicro 4/3rds. I've nerver had a prop in anything on my XY8 config.
I could put the Naza V2 / gps on the XY8 and save $200 dollars , but I'd reallly like the XY8 to be my money shot machine with the larger cameras.
Can anyone tell me or quess how long my arms have to be (or how far apart motors have to be) on an x8 to keep 12" props out of the frame (35mm ish). Currently, my llens is just a little forward of the center of the Aircraft and down about 6-8" below the bottom prop? I'm just on a 2 axis gimbal right now, so don't have to worry about anything other than straight ahead... I currently don't do any fast forward flying so that helps a bit.
Gave the Super X/Discovery combo another go at the field today, I'm not liking this combination much. Seems impossible to find gain settings that work well on the Discovery frame, I think the big problem is the lack of fine tuning ability the gains can only be changed in increments of 1 rather than fractional increments in between like the other flight controllers I use. I have to say this same Discovery flew much better with a Naza on it and that same Naza is going back on it this week, I've tried my best and can't find settings that give the Super X the flight quality I'm used to without being "pitchy" or having serious oscillations in FF.
The X will go back in the box for now and when I get some spare time I'll give it a try on a standard quad frame. I was hoping it would work well as a Naza replacement but given that the majority of the FPV frames I have are asymmetrical it looks like that isn't going to be the case, I'll have to stick with Naza and Multiwii for those.
Ken
The X will go back in the box for now and when I get some spare time I'll give it a try on a standard quad frame. I was hoping it would work well as a Naza replacement but given that the majority of the FPV frames I have are asymmetrical it looks like that isn't going to be the case, I'll have to stick with Naza and Multiwii for those.
Ken
Ken I think the gains can be changed in increments of .1 not 1 which should give a user more fine tuning. Below is the way Drew for Xaircraft America explained it to me. You have to look at the Black Box data to see where your G gains are actually set to get the most accurate reading.
From Drew: The gains you set in the software adjust each of those parameters and the gain on the knob is a separate "overall" gain that adjusts as a percentage of the gain mix you have set in the software. For example if your G is at -60% then you are running your quad at 60% of the mixture of values you have set in the software.
From Drew: The gains you set in the software adjust each of those parameters and the gain on the knob is a separate "overall" gain that adjusts as a percentage of the gain mix you have set in the software. For example if your G is at -60% then you are running your quad at 60% of the mixture of values you have set in the software.
Gave the Super X/Discovery combo another go at the field today, I'm not liking this combination much. Seems impossible to find gain settings that work well on the Discovery frame, I think the big problem is the lack of fine tuning ability the gains can only be changed in increments of 1 rather than fractional increments in between like the other flight controllers I use. I have to say this same Discovery flew much better with a Naza on it and that same Naza is going back on it this week, I've tried my best and can't find settings that give the Super X the flight quality I'm used to without being "pitchy" or having serious oscillations in FF.
The X will go back in the box for now and when I get some spare time I'll give it a try on a standard quad frame. I was hoping it would work well as a Naza replacement but given that the majority of the FPV frames I have are asymmetrical it looks like that isn't going to be the case, I'll have to stick with Naza and Multiwii for those.
Ken
Ken I think the gains can be changed in increments of .1 not 1 which should give a user more fine tuning. Below is the way Drew for Xaircraft America explained it to me. You have to look at the Black Box data to see where your G gains are actually set to get the most accurate reading.
From Drew: The gains you set in the software adjust each of those parameters and the gain on the knob is a separate "overall" gain that adjusts as a percentage of the gain mix you have set in the software. For example if your G is at -60% then you are running your quad at 60% of the mixture of values you have set in the software.
I see no way to make changes that small with the sliders in the GUI, it just goes from one number to the next. No matter where I have put the GUI gains the adjustment knob either makes it too soft to be stable in FF or there is constant visible oscillation there really isn't any in between where it flys like its well balanced. Some of the twitches are actually scary as I usually only see things like that through the goggles when something is about to go horribly wrong.
For whatever reason the Discovery frame can be a challenge for some flight controllers, took me several tries to get one stable enough with a Multiwii to actually be able to fly it without it trying to crash everytime it started FF. Still working on the tuning with the M/W but it flys quite well even with the little bit of jitters I haven't been able to smooth out yet. The X just isn't happy on this frame and as I said in the previous post, this Discovery flew really nice with a Naza on it, all I did was swap one flight controller system for the other, nothing else has changed.
Ken
I see no way to make changes that small with the sliders in the GUI, it just goes from one number to the next. No matter where I have put the GUI gains the adjustment knob either makes it too soft to be stable in FF or there is constant visible oscillation there really isn't any in between where it flys like its well balanced. Some of the twitches are actually scary as I usually only see things like that through the goggles when something is about to go horribly wrong.
For whatever reason the Discovery frame can be a challenge for some flight controllers, took me several tries to get one stable enough with a Multiwii to actually be able to fly it without it trying to crash everytime it started FF. Still working on the tuning with the M/W but it flys quite well even with the little bit of jitters I haven't been able to smooth out yet. The X just isn't happy on this frame and as I said in the previous post, this Discovery flew really nice with a Naza on it, all I did was swap one flight controller system for the other, nothing else has changed.
Ken
Maybe Drew will chime in here. One thing that might be interesting is to upload the Black Box data to Xaircraft in China with your problem and have them analyze the data to see if they can come up with anything.
Rich
XAircraft America
Member
Hey RTRyder, the issue is with the untraditional X on the Discovery, the SuperX does not seem to like it very much for some reason. XA knows about the issue and hopefully will be addressing it in the next firmware update. That being said, if you put that on a regular X it will be rock solid out of the box.
Hey RTRyder, the issue is with the untraditional X on the Discovery, the SuperX does not seem to like it very much for some reason. XA knows about the issue and hopefully will be addressing it in the next firmware update. That being said, if you put that on a regular X it will be rock solid out of the box.
That was my original intention for the X, I have a new Droidworx VM4 frame in a box waiting for assembly and a flight controller. Problem is I won't have time to do a full build for another week or two yet so I went for the quickest route to getting the X in the air, swap it onto a frame that was already flying, unfortunately the only thing I had with only 4 motors and enough room to mount the X was the Discovery. Knowing the problems I've had with other F/C on the Disco I figured it would be a good test, if it could fly it at all it had to be fairly well sorted. It does fly but very twitchy and as I said pretty much impossible to find settings that work in all instances, I'm sure it's just a matter of them doing some work in the firmware.
For now I'll retire it until I have time to put together a normal X frame for it or should they come up with a firmware update/fix before then I have a spare Discovery frame built up that just needs motors and F/C should I decide to give it another try.
Ken
Hey RTRyder, the issue is with the untraditional X on the Discovery, the SuperX does not seem to like it very much for some reason. XA knows about the issue and hopefully will be addressing it in the next firmware update. That being said, if you put that on a regular X it will be rock solid out of the box.
Not what I wanted to here lol just bought the Plates to build the Discovery and put the SuperX on guess I will have to rethink this.
Chet
DucktileMedia
Drone Enthusiast
logically speaking, why does it make any difference? I dont think any other controller has a specific layout for the asymmetrical layouts either. Also, as these are not closed loop systems, how does the controller know where the motors are placed? I'm just curious why it is different if you can run an XY8 with the x8 config on Hoverfly, wookong and MK.
VIQuad
Member
I have the manual for this AD1, an asymmetrical quad, and it shows it having a SuperX controller installed on the quad's . I mean hell its in there own owners/build manual. Here is the picture taken straight from the manual.
So it must be possible, otherwise how did they get this quad to fly if it doesn't work?
http://www.actiondroneusa.com
View attachment 18147
So it must be possible, otherwise how did they get this quad to fly if it doesn't work?
http://www.actiondroneusa.com
View attachment 18147
logically speaking, why does it make any difference? I dont think any other controller has a specific layout for the asymmetrical layouts either. Also, as these are not closed loop systems, how does the controller know where the motors are placed? I'm just curious why it is different if you can run an XY8 with the x8 config on Hoverfly, wookong and MK.
A simplified very high level explanation, in a symmetrical frame the motors are all equidistant from the center point, when the flight controller needs to make a correction (assuming it is placed at the frame CoG) it knows exactly how much to spin opposite motors up or down to accomplish the correction. In an Asymmetrical frame the motors are spaced unevenly and if the firmware in the controller only understands symmetrical layouts then there's a good chance it will be applying the wrong amount of correction to some of the motors since they would actually need more or less due to the asymmetrical layout. End result is it flys like it has rubber arms at times since the amount of correction applied can be far more than whats needed resulting in an opposite over-correction once the F/C senses something isn't right. In extreme cases it can result in the multirotor equivalent of a belly flop into the dirt...

I have the manual for this AD1, an asymmetrical quad, and it shows it having a SuperX controller installed on the quad's . I mean hell its in there own owners/build manual. Here is the picture taken straight from the manual.
So it must be possible, otherwise how did they get this quad to fly if it doesn't work?
Have you actually seen one fly with a Super-X? Hovering in place doesn't count as you can make almost anything stable under those conditions, FFF with some hard banking turns is quite another story.
Ken
Last edited by a moderator: