Again Picloc FAILS....

The first Picloc we had was having the known issue with the USB connector that isn't perfect mounted on the board I think, so George has send us a new one that haven't got this problem.
After tuning the Picloc with the new firmware, all was working perfect! Horizontal was perfectly on level.
BUT, after a bit tuning, save to EPPROM, pressing disconnect button and remove the USB cable PiclocToolz failed, and trying to restart the Picloc by plug in the USB cable, only the White led stays ons, no blue or green leds are on like it normally does.
After a few seconds also the White LED turns off, when pushing the USB cable a little bit to the outside of the Picloc, the Blue, Green and White LED are flashing, like normal...
I try'd to re-solder the joints, make sure if all connections are right with a Multimeter, all these test are good! So I don't know what the problem is with the PicLoc...
When comparing the first and second Picloc I also expected a strange difference between them.
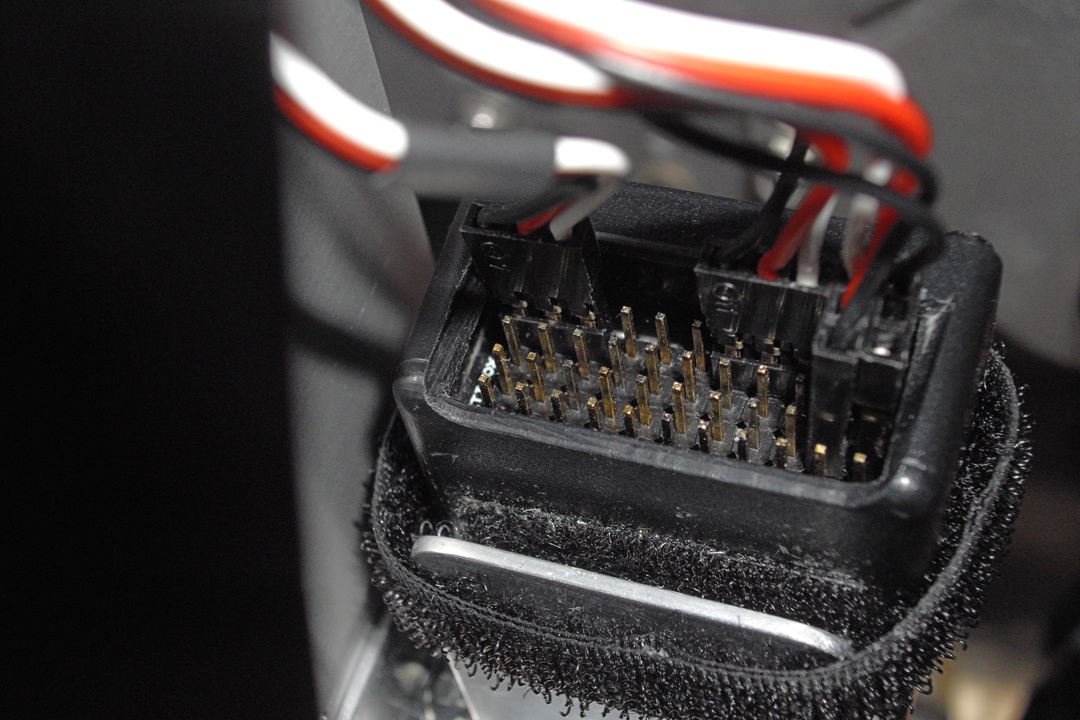
Picloc 1 : 3 contacts are soldered together
View attachment 3834
Picloc 2 : 3 contacts are soldered seperate of each other.
View attachment 3835
EDIT:
Resoldered the USB socket from PicLoc 1 solved the connection problem, I will test if it will hold his memory setting.