hardypalmguy
Member
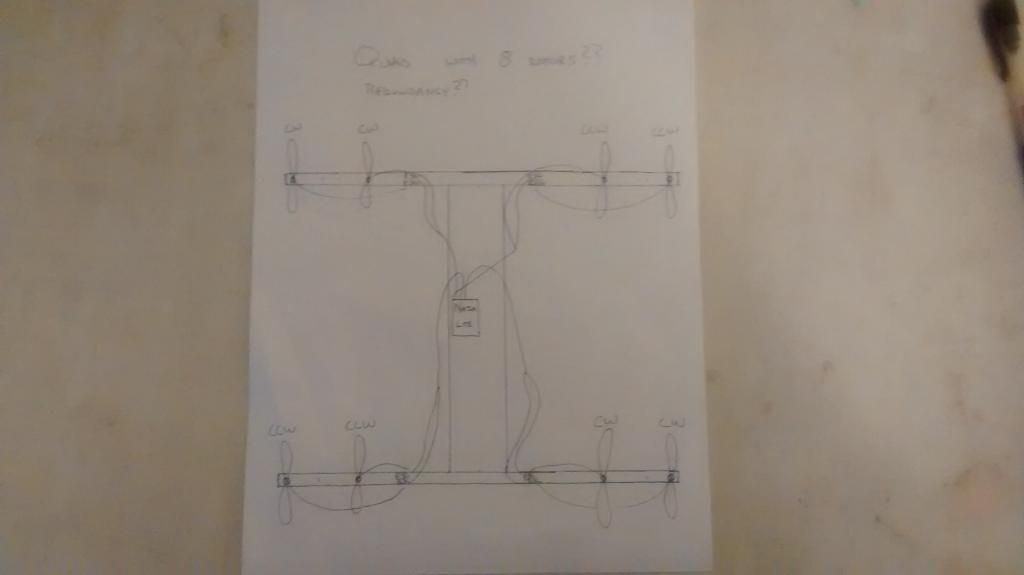
Take a look at the picture below. I'm thinking if this would work in theory. I'm looking for redundancy in case a speed controller or motor takes a crap mid flight. I don't want to build a X8 due to reduction in efficiency due to 4 motors being in others prop wash. I fly using a Naza M lite so a true octocopter isn't possible.
In a nut shell, two motors on each arm spinning with same rotation, Y-connected together to each of the associated ports on the Naza. Setup as a quad X configuration. Thoughts?? Has anyone ever done this?
In a nut shell, two motors on each arm spinning with same rotation, Y-connected together to each of the associated ports on the Naza. Setup as a quad X configuration. Thoughts?? Has anyone ever done this?
Last edited by a moderator: