You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Tau Labs Mounting of OP CC boards
- Thread starter Droider
- Start date
I'd be cautious of "bolting it" it all. In common with all accel/giro devices, it doesn't like vibration. So you wNt to be looking at some way of isolating it from the frame. The other aspect is that if you mount it rigidly to the fuselage and the fuselage twists (in a heavy landing, for example) then it's likely to crack the board if the coupling is too rigid.
One of the best mounting schemes is to use those little silicone rubber "posts" that are sold for mounting PC fans. Certainly it's not easy to isolate something so light - you need something that's VERY soft without letting the board flop around.
One of the best mounting schemes is to use those little silicone rubber "posts" that are sold for mounting PC fans. Certainly it's not easy to isolate something so light - you need something that's VERY soft without letting the board flop around.
matwelli
Member
this is from last weekend, second flight NO TUNING !
http://www.youtube.com/watch?v=872JdVCm15E
very flyable "out of the box"
http://www.youtube.com/watch?v=872JdVCm15E
very flyable "out of the box"
matwelli
Member
here ya go
http://www.youtube.com/watch?v=q83n1UVc1ew
unedited - i crash when the wife walks up asking for the credit card, while on "rate" mode, was flying it like I do in attitude mode - not at all how i should, rate mode demands respect and finess.
As you can hear, the wind is picking up, a bit "blowy" and you can see the gains are slightly too high, and near the end theres about three launches from a 20 deg angle to show it self righting straight away.
manage to launch the go-pro as well , double side tape let go, will post some clips from that later
its a long vid, bit long as no editing
actual flying time i est to be 5 mins, used 1140 mah from th pack, and AUW with the go-pro is about 1100
http://www.youtube.com/watch?v=q83n1UVc1ew
unedited - i crash when the wife walks up asking for the credit card, while on "rate" mode, was flying it like I do in attitude mode - not at all how i should, rate mode demands respect and finess.
As you can hear, the wind is picking up, a bit "blowy" and you can see the gains are slightly too high, and near the end theres about three launches from a 20 deg angle to show it self righting straight away.
manage to launch the go-pro as well , double side tape let go, will post some clips from that later
its a long vid, bit long as no editing
actual flying time i est to be 5 mins, used 1140 mah from th pack, and AUW with the go-pro is about 1100
Gary Mortimer
Member
Nice one, your brave flying under those powerlines
Efliernz
Pete
Brave | Stupid
its a thin line between them
And being from the 'Naki, you are challenged before you start!!!
Pete
matwelli
Member
And being from the 'Naki, you are challenged before you start!!!
Pete
I resemble that comment
Bart - should I moderate "Efliernz" to the naughty corner ?
Kilby
Active Member
Ok, can one of you fine gents post a pic of your board mounted? I'm looking for any tips on what I need to avoid as well. I'm starting from scratch on a home built tricopter, so I won't have the pleasure of attaching to pre-existing mounts. I guess a hard mount is the way to go, or do I need some type of suspension in play?
Any insight would be appreciated. Thanks!
Any insight would be appreciated. Thanks!
Those rubber posts are too rigid IMO. The CC board weighs so little that you need something VERY soft - like silicone gel.I would have thought it would want mounting on them little rubber thingys.. 3mm male thread on one end and 3mm female on the other with a bit of rubber in the middle, think they come in 10mm and 15mm lengths
Dave
Possible sources are:
- those silicone posts sold for mounting PC fans
- sorbothane (or similar) shoe insoles
- "Party Feet" silicone pads for women's shoes
Anything you can jury-rig should do the job - it doesn't take much to hold an 8g board in place.
Like any flight board that relies on accels, ANY vibration that makes it through to the board increases the noise floor and therefore decreases the performance.
Kilby
Active Member
What about mounting it on a type of suspension system? I've been a DJ for about 20 years now and we used to have a suspension system that I built for turntables to keep them from skipping when everyone was jumping up and down on the dance floor. I could picture a much smaller version of that same system being used.. basically rubber bands stretched very tightly between mounting posts with the board attached to the bands. I'm sure it would have to be very stiff to keep unwanted roll out, but I don't think that would be hard to get right.
Ideas, thoughts? Anyone ever tried anything like that?
Ideas, thoughts? Anyone ever tried anything like that?
matwelli
Member
mines hard mounted, havent had any issues (alway hard mount my boards)
rubber band suspended ones - i can almost see them amplifying the vibrations, as this board is so light.
I think a perfect system would have the CC board, the Reciever both mounted to a plate (to combine the mass), and then have the plate soft mounted.
When bolting your board down (i use 4 nylon posts) be super carefull , as there is a surface mounted resistor that can get damaged by your socket driver.
rubber band suspended ones - i can almost see them amplifying the vibrations, as this board is so light.
I think a perfect system would have the CC board, the Reciever both mounted to a plate (to combine the mass), and then have the plate soft mounted.
When bolting your board down (i use 4 nylon posts) be super carefull , as there is a surface mounted resistor that can get damaged by your socket driver.
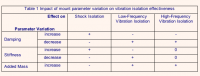
Combining items onto a secondary board is a smart move - the higher the mass, the more effective your isolation is likely to be (see the attached chart).
The other potential problem with hard-mounting is that in the event of a crash, if the frame flexes under impact then that distortion may crack a hard-mounted board.
Mat - you should be able to see if vibration is reaching the board by tying your quad down and running it attached via USB to GCS - examine the "Accel Raw" trace on the Scope gadget.
The other potential problem with hard-mounting is that in the event of a crash, if the frame flexes under impact then that distortion may crack a hard-mounted board.
Mat - you should be able to see if vibration is reaching the board by tying your quad down and running it attached via USB to GCS - examine the "Accel Raw" trace on the Scope gadget.
Attachments
I did try very hard to design the board to be as vibration tolerant as possible, it amazes me that many other boards don't do this, seems weird to have a PCB you know is going to be in a vibration prone environment and not design to it.
I have only ever hard mounted the CC as I wanted to test it in worse cases, my props are chipped and my quad vibrates like a washing machine on a spin cycle. Flies great. You should not have many issues unless you start going to really small frames.
Of course Jeremy's information is spot on, noisy accel will mean more noise for the 3C filter to deal with but Jeremy is a perfectionist. The design of the board and the powerful 3C filter means we should be more vibration tolerant than most other boards, at least in theory.
Of course while quad controllers can get away with with poor PCB design, CC is going on helicopters as well, these are a nightmare: two rotors of different diameter causing simultaneous and variant frequency vibration and also the harmonics to deal with also. This is a good reason why there is only one other flybarless controller with self leveling support and that is serious money, it is very hard to get right.
Note also we have not tested this yet either, I am not making claims yet, we might not pull this off. I am excited how we will do in that area, but self leveling helis really sorts the men from the boys, it needs us to really have a superb PCB and the impressive 3C filter has to be as good as we all think it is. Interesting times for the project.
I have only ever hard mounted the CC as I wanted to test it in worse cases, my props are chipped and my quad vibrates like a washing machine on a spin cycle. Flies great. You should not have many issues unless you start going to really small frames.
Of course Jeremy's information is spot on, noisy accel will mean more noise for the 3C filter to deal with but Jeremy is a perfectionist. The design of the board and the powerful 3C filter means we should be more vibration tolerant than most other boards, at least in theory.
Of course while quad controllers can get away with with poor PCB design, CC is going on helicopters as well, these are a nightmare: two rotors of different diameter causing simultaneous and variant frequency vibration and also the harmonics to deal with also. This is a good reason why there is only one other flybarless controller with self leveling support and that is serious money, it is very hard to get right.
Note also we have not tested this yet either, I am not making claims yet, we might not pull this off. I am excited how we will do in that area, but self leveling helis really sorts the men from the boys, it needs us to really have a superb PCB and the impressive 3C filter has to be as good as we all think it is. Interesting times for the project.