Kilby
Active Member
Hey gang. I've got something that I can't seem to figure out and was hoping to get some fresh perspective from the group.
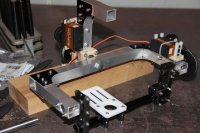
I bought a new gimbal from CopterFrames.com for my NEX. This is the first time I've used one that has incorporated the potentiometer hack. It's a 2 to 1 reduction belt drive set up. The pot is removed from the servo and placed on the pitch axis/axle so it can get a better range of motion. For some reason, the pot seems to get confused every so often and the servo just starts wandering around trying to center itself. At first I thought that a problem with the wookong controlling the gimbal, so I have since removed that from the equation all together and now have the pitch and roll servos hooked directly up to my cam op rx. It still gets confused and just starts searching for center without any input from the cam op radio.
The roll servo that came with the kit never worked from day one, so I replaced that this morning and all seems to be ok with that. The first time I hooked everything up, I had a BEC for just my servos and had the signal wire going to the wookong. It didn't seem to like that at all and I'm wondering if that is maybe the cause of all this?
Can anyone help shed some light on this? I'm going crazy dealing with this for several weeks now, and the company I bought this from are of very little help.
http://www.copterframes.com/index.php?route=product/product&path=70&product_id=52
I bought a new gimbal from CopterFrames.com for my NEX. This is the first time I've used one that has incorporated the potentiometer hack. It's a 2 to 1 reduction belt drive set up. The pot is removed from the servo and placed on the pitch axis/axle so it can get a better range of motion. For some reason, the pot seems to get confused every so often and the servo just starts wandering around trying to center itself. At first I thought that a problem with the wookong controlling the gimbal, so I have since removed that from the equation all together and now have the pitch and roll servos hooked directly up to my cam op rx. It still gets confused and just starts searching for center without any input from the cam op radio.
The roll servo that came with the kit never worked from day one, so I replaced that this morning and all seems to be ok with that. The first time I hooked everything up, I had a BEC for just my servos and had the signal wire going to the wookong. It didn't seem to like that at all and I'm wondering if that is maybe the cause of all this?
Can anyone help shed some light on this? I'm going crazy dealing with this for several weeks now, and the company I bought this from are of very little help.
http://www.copterframes.com/index.php?route=product/product&path=70&product_id=52