3d wana be
Member
[/QUOTE]Battery also on the bottom on mine.

Thanks for saying hello
How does it fly with the naza off to one side?
Could you please post a pic or two of how you mounted the lipo on the belly?
I will start building it again 2moz
[/QUOTE]Battery also on the bottom on mine.
IMHO - With the Naza mounted off to one side I would expect that it will not spin 180 degrees on the frame center and there might be other issues.
The Kalman equations in the IMU are based on having a common center point for the 9 to 12 dof which assumes the IMU, i.e., controller is located at the center of gravity of the airframe.
The x,y and z adjustments in the NAZA software are only a finer adjustment from the center of gravity specific to GPS antenna positioning.
Also unless magnetic north and true north are exactly the same for your flying location(s) the GPS antenna might also need adjustment according to the angle of declination.
Hi all
Doing a tear down and rebuild on my dji f450 this week. Wondering how every one who has mounted the battery on the bottom plate has done so?
Is there any benefit in your opinion, of doing so besides a better looking quad?
Thanks
Hi all
Doing a tear down and rebuild on my dji f450 this week. Wondering how every one who has mounted the battery on the bottom plate has done so?
Is there any benefit in your opinion, of doing so besides a better looking quad?
Thanks
")
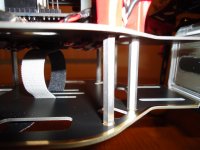
Using these legs to get some space under our 550 and the batwing to move the gopro out front. Ordered another batwing to move the battery back to balance. Should accomplish what you're looking for.
http://www.irisaerial.com/products.html
[/QUOTE]Battery also on the bottom on mine.
Inherent mechanical stability of an aircraft is improved by means of wing dihedral and/or lowering the center of gravity, e.g, lowering the battery. A battery on top reduces inherent mechanical stability making the IMU work harder to compensate. Battery on the bottom also needs landing gear to prevent battery from a puncture on hard landings. Ideally the center of gravity should be in the middle of the IMU which is inside the Naza controller.