.....
Dual Sensors
The second really big change for this release is support for
dual-sensors. We now take full advantage of the dual accelerometers
and dual gyros in the Pixhawk, and can use dual-GPS for GPS
failover. We already had dual compass support, so the only main
sensors we don't support two of now are the barometer and the airspeed
sensor. I fully expect we will support dual baro and dual airspeed in
a future release.
You might wonder why dual sensors is useful, so let me give you an
example. I fly a lot of nitro and petrol planes, and one of my planes
(a BigStik 60) had a strange problem where it would be flying
perfectly in AUTO mode, then when the throttle reached a very specific
level the pitch solution would go crazy (sometimes off by 90
degrees). I managed to recover in MANUAL each time, but it certainly
was exciting!
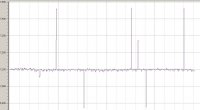
A careful analysis of the logs showed that the culprit was
accelerometer aliasing. At a very specific throttle level the Z
accelerometer got a DC offset of 11 m/s/s. So when the plane was
flying along nice and level the Z accelerometer would change from -10
m/s/s to +1 m/s/s. That resulted in massive errors in the attitude
solution.
This sort of error happens because of the way the accelerometer is
sampled. In the APM code the MPU6000 (used on both the APM2 and
Pixhawk) samples the acceleration at 1kHz. So if you have a strong
vibrational mode that is right on 1kHz then you are sampling the "top
of the sine wave", and get a DC offset.
The normal way to fix this issue is to improve the physical
anti-vibration mounting in the aircraft, but I don't like to fix
problems like this by making changes to my aircraft, as if I fix my
aircraft it does nothing for the thousands of other people running the
same code. As the lead APM developer I instead like to fix things in
software, so that everyone benefits.
The solution was to take advantage of the fact that the Pixhawk has
two accelerometers, one is a MPU6000, and the 2nd is a LSM303D. The
LSM303D is sampled at 800Hz, whereas the MPU6000 is sampled at
1kHz. It would be extremely unusual to have a vibration mode with
aliasing at both frequencies at once, which means that all we needed
to do was work out which accelerometer is accurate at any point in
time. For the DCM code that involved matching each accelerometer at
each time step to the combination of the GPS velocity vector and
current attitude, and for the EKF it was a matter of producing a
weighting for the two accelerometers based on the covariance matrix.
The result is that the plane flew perfectly with the new dual
accelerometer code, automatically switching between accelerometers as
aliasing occurred.
Since adding that code I have been on the lookout for signs of
aliasing in other logs that people send me, and it looks like it is
more common than we expected. It is rarely so dramatic as seen on my
BigStik, but often results in some pitch error in turns. I am hopeful
that with a Pixhawk and the 3.0 release of APM

lane that these types
of problems will now be greatly reduced.
For the dual gyro support we went with a much simpler solution and
just average the two gyros when both are healthy. That reduces noise,
and works well, but doesn't produce the dramatic improvements that the
dual accelerometer code resulted in.