You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
A2 FC Firmware 2.3 - Here We ALL go Again
- Thread starter Droider
- Start date
DucktileMedia
Drone Enthusiast
My friend just crashed his heli in the bottom of some ocean in Norway from some interference problem and wrote these words. I thought it was so funny I had to share.
"The first time, I thought it was interference. The second time, there was nothing to interfere"
If only DJI would be honest and use this as their new slogan.")
"The first time, I thought it was interference. The second time, there was nothing to interfere"
If only DJI would be honest and use this as their new slogan.
MombasaFlash
Heli's & Tele's bloke
Was he using an ACE One or Wookong H on his helicopter?
gtranquilla
RadioActive
Very interesting question!.....
my guess is No...
but check with DJI support people.....
my guess is No...
but check with DJI support people.....
In the light of the problems I am going to replace the A2 on my S1000 with a Wkm till this is sorted. Can I use the IMU from the A2 with the Wkm?
cheers
MombasaFlash
Heli's & Tele's bloke
Not so sure. The IMU.v2 that DJI introduced for Wookong users, supposedly to overcome S800's falling out of the sky if they were more than 7kg AUW, actually has "A2" written on the back of it. It was introduced around the same time that the A2 was announced at the NAB, leading to speculation that it was in fact the A2 IMU - although some around here were already jaded by DJI's antics and suggested it was just more of their marketing hi-jinx with the normal WKM IMU innards shoved into a fancy aluminium box, with its scandalous 250 euro price tag.
Which means that the answer to the question is probably Yes. But do ask someone else first.
Which means that the answer to the question is probably Yes. But do ask someone else first.
DucktileMedia
Drone Enthusiast
no it was the NAZA lite. But i still have little faith in anything they make.
My friend just crashed his heli in the bottom of some ocean in Norway from some interference problem and wrote these words. I thought it was so funny I had to share.
"The first time, I thought it was interference. The second time, there was nothing to interfere"
If only DJI would be honest and use this as their new slogan.
MombasaFlash
Heli's & Tele's bloke
Ah, when you wrote 'heli' I took it to be a single-rotor.
I have an A2 equipped EVO that is about to be soak-tested. With Zen removed and legs up, it will have thirty flights or more and see if it crosses this mystical threshold between Everything's Great and Oh Bugger.
I have an A2 equipped EVO that is about to be soak-tested. With Zen removed and legs up, it will have thirty flights or more and see if it crosses this mystical threshold between Everything's Great and Oh Bugger.
teecee
Member
I just upgraded to the A2 2.3 firmware and I am a bit scared. I was at 2.1 so it had been a while. When I first booted up I had lots of errors (controller, sticks calibration, compass etc). This morning it is just compass which worries me a little. Especially now that I have a gig in 2 days. Yikes!
BirdsEyeProd
Member
The A2 system has taken out my copter. DJI is saying I had an ESC fail and go full throttle (M1) which caused the copter to start spinning... only problem was it started spinning way before the esc went full throttle according to the iOSD Logs. Here are screenshots of the logs from the motors along with the video showing it going down. I am also including my iOSD file so you can take a look for yourself and see if you can find anything. I honestly don't believe that an ESC caused this. The copter started spinning clockwise then stopped and went counter clockwise. I will be inspecting all my motors and escs today and then sending them back to KDE for them to inspect and tell me if they find anything wrong.
Video: http://youtu.be/bgHHrnVx9HM
iOSD File: http://www.filedropper.com/fly011
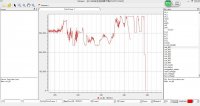
Motor 1 Graph from iOSD File:

You will see the copter hit the ground at the 25 second mark (video has been shortened to show just the crash). This means the spin started way before you see the motor go full power in the graph! You can clearly see the copter spinning 11 seconds into the video which is 14 seconds before the copter hit the ground. According to the data from the iOSD the motor didn't hit full throttle till 5 seconds before the crash. So how does this mean the motor hitting full speed caused the crash if the copter was already spinning wildly before it went down?
Would love to hear your thoughts on this.
Video: http://youtu.be/bgHHrnVx9HM
iOSD File: http://www.filedropper.com/fly011
Motor 1 Graph from iOSD File:
You will see the copter hit the ground at the 25 second mark (video has been shortened to show just the crash). This means the spin started way before you see the motor go full power in the graph! You can clearly see the copter spinning 11 seconds into the video which is 14 seconds before the copter hit the ground. According to the data from the iOSD the motor didn't hit full throttle till 5 seconds before the crash. So how does this mean the motor hitting full speed caused the crash if the copter was already spinning wildly before it went down?
Would love to hear your thoughts on this.
Attachments
Just to be on the fair side. Here is the response from the engineer.
"According to the data, the M1 output reached its limit first, then it started to spin.
Though the report mentioned ESC and Motor were fine but we doubt that it would malfunction when loaded.
MC stab was working fine according to the data and video. Our conclusion is ESC/Motor failure on M1 caused the crash."
"According to the data, the M1 output reached its limit first, then it started to spin.
Though the report mentioned ESC and Motor were fine but we doubt that it would malfunction when loaded.
MC stab was working fine according to the data and video. Our conclusion is ESC/Motor failure on M1 caused the crash."
BirdsEyeProd
Member
Ed, Have you watched the video??? You can CLEARLY see the copter is spinning way before the graph shows M1 or any of the motors reaching full throttle. Also if the graph is showing full throttle wouldn't that indicate that the controller is COMMANDING the ESC to go to full throttle? I know the A2 doens't log info coming back from the ESC. If this is the case why would the ESC fail going to full throttle then the A2 data showing that its commanding the ESC to go to full throttle? Something doesn't add up here!
I am about to test all the motors and ESCs again myself. I will be adding an 18" prop and running the motor up to full throttle and let it sit there for a bit. I will be recording the tests then will also be sending all the motors and ESCs to KDE for further testing.
I am about to test all the motors and ESCs again myself. I will be adding an 18" prop and running the motor up to full throttle and let it sit there for a bit. I will be recording the tests then will also be sending all the motors and ESCs to KDE for further testing.
BirdsEyeProd
Member
I will do that then and post it.
BirdsEyeProd
Member
Ed,
Here is a synced video showing the graph with the video. Would love to hear your thoughts. Anyone else, please feel free to chime in. I may setup the same video with other data points as well.
Here is a synced video showing the graph with the video. Would love to hear your thoughts. Anyone else, please feel free to chime in. I may setup the same video with other data points as well.
Last edited by a moderator:
gtranquilla
RadioActive
It would be good to resolve the cause and effect conundrum here... obviously it is a coax MR config.
Looking very closely at the top of the video screen, the 1st indication of the MR spinning occurs just before 4 seconds from the start of the video and we can later see the MR rotating in the opposite direction. The sound of the motors is very confusing. And there is no indication that the camera gimbal system was introducing any system oscillation so as to throw off the FC IMU sensors as the camera maintained good yaw heading motor until near the bitter end. I guess you don't have any videos of this incident taken from the ground!
I hope you get a fair resolution from this!
Looking very closely at the top of the video screen, the 1st indication of the MR spinning occurs just before 4 seconds from the start of the video and we can later see the MR rotating in the opposite direction. The sound of the motors is very confusing. And there is no indication that the camera gimbal system was introducing any system oscillation so as to throw off the FC IMU sensors as the camera maintained good yaw heading motor until near the bitter end. I guess you don't have any videos of this incident taken from the ground!
I hope you get a fair resolution from this!
BirdsEyeProd
Member
Thanks. I too hope it is fairly resolved. I just tested motor 1. Works perfect.
gtranquilla
RadioActive
BirdsEye,
What ESCs and motors were you using on that setup? If using 22 pole pancake style motors, there are known issues with many motor/escs combos related to "detent"..... sometimes referred to as "cogging". Motors with the very best neodymium magnets are most efficient but also are the more severe challenge for many ESCs including those programmed with SimonK.
What ESCs and motors were you using on that setup? If using 22 pole pancake style motors, there are known issues with many motor/escs combos related to "detent"..... sometimes referred to as "cogging". Motors with the very best neodymium magnets are most efficient but also are the more severe challenge for many ESCs including those programmed with SimonK.
BirdsEyeProd
Member
KDE 4014-380kvs with KDE 55+ amp escs.
MombasaFlash
Heli's & Tele's bloke
Ed,
Here is a synced video showing the graph with the video...
I cannot offer any helpful towards the A2 issue, but I do hope you manage to resolve it.
How did you setup that video/chart sync video? That is a very neat analysis technique, by displaying behaviour against a timeline, and potentially invaluable in challenging a fob-off from DJI.
KDE 4014-380kvs with KDE 55+ amp escs.
Check out this thread on freefly, kde have made some changes after these findings. Not sure it's relevant to your problem.
http://forum.freeflysystems.com/index.php?threads/crash-video-x8-with-kde-4014-into-the-water.4598/
Pete