You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Hoverfly XY-8 Build, Rev4, Hoverfly
- Thread starter Bartman
- Start date

SleepyC
www.AirHeadMedia.com
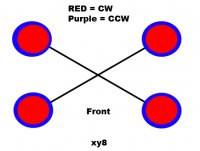
This is a pic of one of Barts older rigs and a little diagram of what makes it an XY8.
View attachment 9972View attachment 9973
View attachment 9972View attachment 9973
Attachments

smartaquad
Member
Is there any particular benefit of having all top props CW ans botom CCW ?
Im just building a X8 with MK electronics, I think the setup is diferent..
Regards
Im just building a X8 with MK electronics, I think the setup is diferent..
Regards
Mactadpole
Member
@smartaquad - I run an XY-8 and an X8 on MK and I have my props alternating rotation on top and bottom. So, 2 are CW and 2 are CCW on top and the props below spin opposite. I don't know of any +'s or -'s.
@Aerovideo - Yep, the idea is to clear the FOV and no there does not seem to be any control issues. Been flying one for over a year or so.
@Aerovideo - Yep, the idea is to clear the FOV and no there does not seem to be any control issues. Been flying one for over a year or so.
kloner
Aerial DP
it helps with filming forward flight. this was with a single axis gimbal and probably that frame thats in the picture sleepy posted, mine was a mk version he had versioned up from
http://www.youtube.com/watch?v=QRtY6NQUZ5U
http://www.youtube.com/watch?v=QRtY6NQUZ5U
Bartman
Welcome to MultiRotorForums.com!!
when i started with coaxial quads the conventional wisdom said you had to have alternating props on the top AND alternating props on the bottoms. that means two spinning CW on top and two spinning CCW on top, same on the bottom so you've got four different size/rotation props for a full set of eight. I wanted to simplify that by spinning all of the top one way and all of the bottoms the other. it seemed reasonable to assume that the bottoms would be more prone to damage so I wanted them to spin the conventional way which is (on a plane) clockwise when viewed looking forward from the cockpit. conventional props (tractor as opposed to pushers) are easier to come by and less expensive so if you're going to be breaking props those are the ones you want to break.
i tried this scheme when i built the first test XY8 airframe. it worked great, it survived motor out events, so I've never looked back. THe Mikrokopter mixer table can be configured to run this way, I've got one set up like this that has been flying very reliably for over a year. I just pulled it off the shelf last week and went out to shoot a house with it without doing anything but putting a battery (actually three) on it.
there are a lot of theories but the science behind them is sometimes hard to find. the best thing can be to just build it and see for yourself what it does.
i tried this scheme when i built the first test XY8 airframe. it worked great, it survived motor out events, so I've never looked back. THe Mikrokopter mixer table can be configured to run this way, I've got one set up like this that has been flying very reliably for over a year. I just pulled it off the shelf last week and went out to shoot a house with it without doing anything but putting a battery (actually three) on it.
there are a lot of theories but the science behind them is sometimes hard to find. the best thing can be to just build it and see for yourself what it does.
Bartman
Welcome to MultiRotorForums.com!!
Ahhh interesting, thanks kloner and Sleepyc, that definitely helps.
Is the reasoning behind this for clearing the camera FOV?
Are there any pitch control problems where the wingspan is shorter for pitch than it is for roll?
Thanks again!
no problems that I've seen so far.
Bartman
Welcome to MultiRotorForums.com!!
i stood on the tee box of a nice golf course one morning with a 15 mph head wind and the need to fly forward over the fairway at at least another 15 to 20 mph. I couldn't do it with the heli i was flying at the time as the props/motors were coming well down into view of the camera. At the time Droider was enjoying his Y-6 but I didn't want to go to a 6 motor heli, I wanted to keep with my 8-motor configuration. After scratching my head for a little while I came up with what I call the XY8 configuration. I've got the open forward viewing of a Y with the 8 motor power and redundancy of an Okto. It flew fine, continues to lend itself to development and refinements, and will be available shortly from the shop I'll be opening soon. ")
here's a recap from the first test flight of an XY8 configged heli...
here's a recap from the first test flight of an XY8 configged heli...
Last edited by a moderator: