You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Hoverfly XY-8 Build, Rev4, Hoverfly
- Thread starter Bartman
- Start date
SamaraMedia
Active Member
ary, what pancakes are going to be using?
John
John
SamaraMedia
Active Member
Thanks, what kind of payload you carrying? Flight times?
Bartman
Welcome to MultiRotorForums.com!!
Tiger MT4008-18 for the first build, Tiger MN4012 for the second.
The first build will probably fly in the 12 to 13 pounds range with the camera, mount, and batteries I have for it.
Flight times with the current revision are in the range of eight to nine minutes (with outside air temps below 90 F or so, close to sea level, and flying weight of 11.5 pounds) with two 5500mah 4S packs. Both of these builds will use 6000mah 6S packs so I'm expecting flight times to be greater and there's room for four packs so that will also be explored.
Bart
The first build will probably fly in the 12 to 13 pounds range with the camera, mount, and batteries I have for it.
Flight times with the current revision are in the range of eight to nine minutes (with outside air temps below 90 F or so, close to sea level, and flying weight of 11.5 pounds) with two 5500mah 4S packs. Both of these builds will use 6000mah 6S packs so I'm expecting flight times to be greater and there's room for four packs so that will also be explored.
Bart
Last edited by a moderator:
SamaraMedia
Active Member
Holy crap Batman, I mean Bartman! That's excellent.
I'm building a UAP1 hexa from Rust and trying to figure the configuration I want to explore. Looking at 16mm, 1.5mm Wall, 3K Wrap, High Gloss, 13" for the arms. Figure it is a good step up from the F550 I'm using now. I can barely get 6 minutes from my current setup at 3200g. What esc's are you using since it can run up to 6s batteries.
What kv on the MN4012's. props?
John
I'm building a UAP1 hexa from Rust and trying to figure the configuration I want to explore. Looking at 16mm, 1.5mm Wall, 3K Wrap, High Gloss, 13" for the arms. Figure it is a good step up from the F550 I'm using now. I can barely get 6 minutes from my current setup at 3200g. What esc's are you using since it can run up to 6s batteries.
What kv on the MN4012's. props?
John
Last edited by a moderator:
Bartman
Welcome to MultiRotorForums.com!!
Frame plates and motor/boom mounts are expected early next week so I've started making the parts that I can while I'm waiting. Here's a pic of the power harness. With past builds where I've used 4S packs I've had the power distribution and ESC's centrally located. With the 6S packs I'm planning to use for this heli it's been decided to move everything out to the motors. Hovering power will draw 3.5 to 7 amps per motor depending on weight and this first heli is using the Tiger 4008-18 motors rated at 18 A max. The harness has provisions to attach two batteries and if I decide to use four batteries I'll just Y them into the two attach points.
The first pic shows the new power distribution harness. The second and third pics show the modified Voltair board I've used for past builds and the install of the ESC's. With future 4S builds I'll likely a combination of the two schemes with a straight harness, centrally located ESC's, and a shrink-wrapped bullet connector between the ESC's and power harness. If everything goes well with this build then all future 6S builds will have the decentralized power and ESC scheme.
Checking the bullet connectors will be on the semi-annual maintenance list though to make sure they don't build up corrosion over time thus weakening the connection (and increasing electrical resistance in the joint).
View attachment 9309View attachment 9308View attachment 9307
The first pic shows the new power distribution harness. The second and third pics show the modified Voltair board I've used for past builds and the install of the ESC's. With future 4S builds I'll likely a combination of the two schemes with a straight harness, centrally located ESC's, and a shrink-wrapped bullet connector between the ESC's and power harness. If everything goes well with this build then all future 6S builds will have the decentralized power and ESC scheme.
Checking the bullet connectors will be on the semi-annual maintenance list though to make sure they don't build up corrosion over time thus weakening the connection (and increasing electrical resistance in the joint).
View attachment 9309View attachment 9308View attachment 9307
Attachments



Bartman
Welcome to MultiRotorForums.com!!
Its a big decision, when I went into building for others it was a very stressful 12 months. Stopped flying for fun. You spend hours building and if you were stupid enough to offer an ardupilot as part of the package, hours tuning/fighting it
Happy to be out of it ( and so is my wife/kids) working all day then coming home and working on airframe at night. As well as hours on the phone on support
I vote for mfg/dist
Sent from my GT-I9300T using Tapatalk 2
Mat,
I keep thinking about your comments but I'm leaning towards a shop supplying frames, parts, general supplies, and builds to include assembled/wired units ready for the owner's install of a flight control system. As much as I've been leaning towards Hoverfly, I realize that it is a choice others might make differently. With that in mind I think the best approach will be to offer a heli where the owner can drop their FC in, plug the ESC's in, configure and go fly.
To keep it all under control I think I will need to initially establish a production schedule and keep the slots spaced 10 to 14 days apart. I've had employees before so when the shop is ready I'll bring people in to help. I'm also looking forward to equipping the shop with CNC equipment at some point.
It's exciting and I'm looking forward to having the last details worked out and finalized. Motor/boom mounts are already in the mail and should be here tomorrow. Just need frame plates and I'm ready to go. The final dome design will be addressed when the heli is built and flying.
Onward and upward,
Bart
Bartman
Welcome to MultiRotorForums.com!!
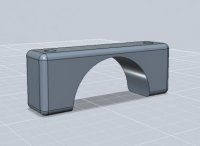
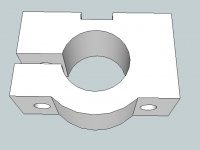
a box just arrived with the motor/boom mounts. they're machined from Delrin and I'm very happy with how they've come out. Also, this morning, I machined some brackets to hold tubing for a landing gear idea I've been meaning to try. I don't love the way the idea was working out so they're basically trash. I'm in the process now of working with a carbon fiber shop to have custom gear molded for my heli and will likely use Droidworx gear in the interim.
Pics!
Gear/tube mounts
View attachment 9339
abandoned tube gear idea
View attachment 9338
Pics!
Gear/tube mounts
View attachment 9339
abandoned tube gear idea
View attachment 9338
Attachments


Kilby
Active Member
Nice job, Bart. I was just sitting here designing some myself, but those look much nicer.
View attachment 9341
View attachment 9341
Attachments
matwelli
Member
a box just arrived with the motor/boom mounts. they're machined from Delrin and I'm very happy with how they've come out. Also, this morning, I machined some brackets to hold tubing for a landing gear idea I've been meaning to try. I don't love the way the idea was working out so they're basically trash. I'm in the process now of working with a carbon fiber shop to have custom gear molded for my heli and will likely use Droidworx gear in the interim.
Pics!
Gear/tube mounts
View attachment 12052
abandoned tube gear idea
View attachment 12051
i did my mounts on a 3D printer, they clamp a 12mm tube, and the holes are 19mm apart (motor size) , one piece keeps em together, and the plastic flexes enough to make a really firm grip on the carbon tube - maybe usefull ?
View attachment 9347
Attachments
Bartman
Welcome to MultiRotorForums.com!!
matt,
be careful clamping from one side like that. the base of the motors is not very rigid and will flex if that clamp deflects much. i learned this the hard way early on by over tightening motor mounts that came with a frame kit i had bought.
flex is one way to get clamping pressure on the tube, with my clamps i've got about 4mm of gap between the parts and about 2 to 3 thousandths of interference between the clamp and tube so they sort of snap on and then clamp down to stay tight.
the trick is to not overtighten them. they should be tight enough to stay put during flight but not too tight to also rotate on the tube in a crash. between the wood props and these motor mounts, most encounters with earth should leave the booms protected and the motors salvageable. at the worst, i've usually only had to clean a little dirt out of things, replace bearings, get the motor mount re-aligned and i'm back flying.
bart
be careful clamping from one side like that. the base of the motors is not very rigid and will flex if that clamp deflects much. i learned this the hard way early on by over tightening motor mounts that came with a frame kit i had bought.
flex is one way to get clamping pressure on the tube, with my clamps i've got about 4mm of gap between the parts and about 2 to 3 thousandths of interference between the clamp and tube so they sort of snap on and then clamp down to stay tight.
the trick is to not overtighten them. they should be tight enough to stay put during flight but not too tight to also rotate on the tube in a crash. between the wood props and these motor mounts, most encounters with earth should leave the booms protected and the motors salvageable. at the worst, i've usually only had to clean a little dirt out of things, replace bearings, get the motor mount re-aligned and i'm back flying.
bart
matwelli
Member
matt,
be careful clamping from one side like that. the base of the motors is not very rigid and will flex if that clamp deflects much. i learned this the hard way early on by over tightening motor mounts that came with a frame kit i had bought.
flex is one way to get clamping pressure on the tube, with my clamps i've got about 4mm of gap between the parts and about 2 to 3 thousandths of interference between the clamp and tube so they sort of snap on and then clamp down to stay tight.
the trick is to not overtighten them. they should be tight enough to stay put during flight but not too tight to also rotate on the tube in a crash. between the wood props and these motor mounts, most encounters with earth should leave the booms protected and the motors salvageable. at the worst, i've usually only had to clean a little dirt out of things, replace bearings, get the motor mount re-aligned and i'm back flying.
bart
Thanks Bart, i hadnt really thought that part thru, havent had an issue yet, but i can see how it happens - think i will go to two piece mounts
")
Bartman
Welcome to MultiRotorForums.com!!
Thanks Marlon.
Last night had me up late (after the new episode of Gold RUsh) preparing the ESC's. First the wrapper gets cut off then the servo wires are desoldered. I give each one a quick inspection and then attach a longer servo wire followed by some hot glue to secure the capacitor to the board. Before the new heat shrink goes on the board get a light cleaning with alcohol then it's buttoned back up and ready to go. The motor wires will be soldered directly to the ESC and the power wires will be cut to length before getting their bullet connectors soldered on.
View attachment 9356
Last night had me up late (after the new episode of Gold RUsh) preparing the ESC's. First the wrapper gets cut off then the servo wires are desoldered. I give each one a quick inspection and then attach a longer servo wire followed by some hot glue to secure the capacitor to the board. Before the new heat shrink goes on the board get a light cleaning with alcohol then it's buttoned back up and ready to go. The motor wires will be soldered directly to the ESC and the power wires will be cut to length before getting their bullet connectors soldered on.
View attachment 9356
