BorisS
Drone Enthusiast
Good point, i always assumed it would have worked at full voltage, it seems odd, because it works on up to a 14s battery, so how can it measure all the voltages if its coming though a regulator first?
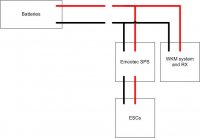
There is no regulator before the graupner air module. The air module measures the current draw and voltage raw over GND, it only has this thin plus cable connection to power itsself. It takes the full voltage in and regulates it down to pwoer itself and i suspect the rx afterwards. If in any case the safery switch approach is the same you will let the safety switch and its remote power eachother but only connect the singal cable from the remote switch to the rx.
") I lost a machine in the early days due to a binding servo mechanism + poor quality ubec.
I lost a machine in the early days due to a binding servo mechanism + poor quality ubec.