I have both gains on the radio. I tend to start the bird take it up a couple meter and readjust the basic gain (starting on 200% on pitch and roll) first until having the bird oscillate. Take the basic down a bit or whatever it seems to need but only for pitch and roll, yaw i have fixed on 150 %. I always start off with attitude 100% about middle of my control and than i see what happens normally only flying in attitude i end up in 50 55 %. I dont know exactly since i don't read the values out at the end over the config tool. But i now that lowest point possible for attitude that i can get to with radio control is 50%. If i get rid of the height throttle stick issue, which i think is due to the herkules reacting to sensitive to the PPM signal and not filtering anything or not enough, it should get more steady.Luckily Andreas Baier has a WKM setup heading his way and he will take a look at it, which could turn out to make the Herkules getting a firmware adjusted to the WKM, which would be great. Why my AV 130 misbehaves i have no clue. The longer the bird is in the air the worse it gets. And the funny thing is from lipo to lipo every additional flight it also seems to get worse. But to tell the truth with expo 40% and than i normally switch dual 70% to it, i am fine at the moment without the servos.
I agree there will not be one perfect setting. I think it has a lot to do with weight, i even notice a difference if i have my 300 gram lens on the canon or the stock lighter lens in my eyes also effecting the gain.
What i still want to do it build something that i can really find the COG of my copter in the Z axis, these aprox. numbers i punch in i am not a friend of. If i understand the firmware update correctly configs can be imported and exported now. So i have a setup for the heavy cam with the heavy lens with 1 or 2 lipos and for once and all the right z axis variable which i just play in before the flight. It would be really cool if one could have 2 or 3 setups stored in the WKM MC that could be loaded with a switch on the radio making the noteboook obsolete.
Boris
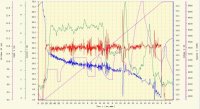


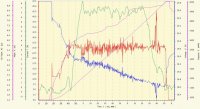
") . Flight time is 4:55 minutes plus another 2:33 min in a different log file, landed the bird in between and Unilog for some reason wrote another file.
. Flight time is 4:55 minutes plus another 2:33 min in a different log file, landed the bird in between and Unilog for some reason wrote another file.