Is there anyone succesfully flying a wkm with graupner ppm sum? I can make it work on the software assistant using SUMO8 or SUMO12 option on a MC-32 but looks like DJI uses Futaba train channel order (ail/ele/thr/rud) while graupner uses another secuence (thr/ail/ele/rud). Thus way I cant get a right channel asignement. Channel mapping inside the tx only afects the normal output channels and not the ppm sum order. So, anyone?
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
WKM and Graupner ppm sum
- Thread starter elossam
- Start date
BorisS
Drone Enthusiast
can't let loose of the futaba s-bus at the moment. Especially because of the ease of setup and that no settings are needed for fail-safe. How is it with graupner and the ppm sum does the receiver have to be programmed to certain servo settings, or is the info passed on to the WKM the that signal is dropped and wkm goes to failsafe with no additional settings etc ?
Thanks
Boris
Thanks
Boris
Channel sequence changed using the Tx swap menu. The unit goes into failsafe programming it the same way as done before with the traditional servo output way.. Thr holds the same posittion you have it at the momment you go into FS mode, at least thats what the WKM shows in display.
RyanMcCrae
Member
Have you managed to get it working? Im having issues getting my mc-32 working with a gr-16 and Naza. I would like to use sum signal also.
RyanMcCrae
Member
Im having issue with assigning the correct channels im using sum 12 at the moment. and Ive had issues with channels crossing, eg elevator would operate x1 trim as well as elevator.
I think ive got rid of it. But now I can seem to get the trim correct, in the dji assistant i can see the the aileron and elevator sticks are sitting to the left of centre, I cant seem to get them to sit centred and the trim on the radio isnt enough to move it to the centre.
Could you share your channel sequencing with me?
I think ive got rid of it. But now I can seem to get the trim correct, in the dji assistant i can see the the aileron and elevator sticks are sitting to the left of centre, I cant seem to get them to sit centred and the trim on the radio isnt enough to move it to the centre.
Could you share your channel sequencing with me?
Last edited by a moderator:
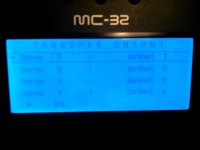
View attachment 7102 This is the channel secuence. Its better to start from a new model memmory to avoid any unexpected mixer or channel specs unintentionally modified. Rest of channels (5,6,7...) are perfectly assigned 5-5, 6-6, 7-7. ..
Attachments
RyanMcCrae
Member
Thanks, I had it nearly the same as that.
Do you have it set up as the heli or a plane?
What switches do you use?
Do you have it set up as the heli or a plane?
What switches do you use?
As a plane with one servo for aileron only and traditional tail (not V). Heli mode or two ail servos or V tail could be the reasson of your gost mixers. I use the right three position switch for flight modes, the right long switch with spring for RTH and two sliders on the center for tunning the gains. One of the is exchanged later to use the carefree and POI modes.
RyanMcCrae
Member
Just managed to get it hovering. But Im having an odd issue: at say mid throttle i get interference on the mode switch and it jumps out of manual or atti mode. Ive tried using the travel limits and off set to see if i can get around it. But I cant is really annoying. Ive only managed to get one slider set up for gain. Did you have any issues like this to work around?
Also how do you set up telemetry of the flight battery, i can see the rx voltage. But I thought it would give me the battery volts?
Also how do you set up telemetry of the flight battery, i can see the rx voltage. But I thought it would give me the battery volts?
No idea about whats happening with your system. Have had no problems like described. Look at the servo display to see if any channel interact with any other. Switch assign or ATV works the same way no matter if it runs in ppmsum or not. Did you changed something in the channel pulse lengh?. You cant get the power battery telemetry unless you have the reauired module, do you have it?
Lanzar
Member
Is there anyone succesfully flying a wkm with graupner ppm sum? I can make it work on the software assistant using SUMO8 or SUMO12 option on a MC-32 but looks like DJI uses Futaba train channel order (ail/ele/thr/rud) while graupner uses another secuence (thr/ail/ele/rud). Thus way I cant get a right channel asignement. Channel mapping inside the tx only afects the normal output channels and not the ppm sum order. So, anyone?
Dont use it with ppm unless you have a good graupner reciver with no ppm jitter. Othervise when you moove sticks it can drop from altitude mode or gps to no mode when jitter is present. I would go normal wire for each channel. I will post wideo on what hapenes with ppm and jitter.
Dont use it with ppm unless you have a good graupner reciver with no ppm jitter. Othervise when you moove sticks it can drop from altitude mode or gps to no mode when jitter is present. I would go normal wire for each channel. I will post wideo on what hapenes with ppm and jitter.
May I see that on the adjust software or it happens in flight only?
Lanzar
Member
http://www.youtube.com/watch?v=yA747xqTnh4&feature=youtu.be
Here is the video. Sory for quality but i made it with phone. YOu can see atti going on and off while i moove sticks. PPM jitter and present on almost all reciver tranmiters i have tried.
Here is the video. Sory for quality but i made it with phone. YOu can see atti going on and off while i moove sticks. PPM jitter and present on almost all reciver tranmiters i have tried.
I see. Will check it later. Have you changed the pulse wide in the rx config menu of your tx? Or it is still at 20 ms each channel? The oy thing I noticed is that now in gps position hold the unit start the toilet bowl effect but Im not sure if it is due to the ppm or any ither changes I did over the ufo.
It s not my case. Not any single channel affects each other like shown in your video. And there is no relation between toilet bowl dance and ppsum. Changed today to normal system and the bowl effect is still there. Its time to downgrade the wkm to a previous firm version and compare.
Need some help. I have the GR-24 as rx and mx-20 as tx. I managed to setup my Wookong system with PPM. Swapped some channels around but the only thing I cannot get working is failsafe. I have a Go Home Switch on channel X3 and this works when I switch it. However when I power off my tx nothing happens. I tried some fiddeling in the tx failsafe settings but I can't really find it.
Can someone help me out?
Can someone help me out?