PilotHal
Real Pilot, RC's Too
I'm trying to wrap my head around the various concepts related to selecting the proper motor Kv and prop size as well as selecting the proper ESC for a specific motor of choice.
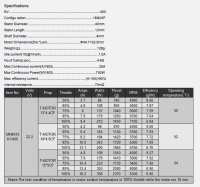
When looking at the specs on a T-Motor, say for example the MN4012, the manufacturer specifies the various characteristics of the motor along with prop suggestions. One column of interest is the (A) column; showing the total amount of current the motor will draw at different percentages of throttle.
In the case of the MN4012, when using a 13x4.4 CF prop at 100% throttle the motor will draw 9.4A - see attached image.
My question is why do people spec out a 40A ESC if the motor (in this example) will only draw 9.4A? Furthermore, the motor will only draw a maximum of 25A continuous.
So, wouldn't a 35A ESC be sufficient in this case? Most people are not running their motors on their multi rotors at 100% continuous - maybe for brief throttle "punches" - assuming hovering is at mid-stick or 50% throttle, you could use 65% power as the average current draw. For the example motor, that would put you at 4.8A of current. Even less that 9.4A.
Does anyone have the logic for how you spec out the proper size ESC for a multi rotor motor/prop configuration?View attachment 15169
When looking at the specs on a T-Motor, say for example the MN4012, the manufacturer specifies the various characteristics of the motor along with prop suggestions. One column of interest is the (A) column; showing the total amount of current the motor will draw at different percentages of throttle.
In the case of the MN4012, when using a 13x4.4 CF prop at 100% throttle the motor will draw 9.4A - see attached image.
My question is why do people spec out a 40A ESC if the motor (in this example) will only draw 9.4A? Furthermore, the motor will only draw a maximum of 25A continuous.
So, wouldn't a 35A ESC be sufficient in this case? Most people are not running their motors on their multi rotors at 100% continuous - maybe for brief throttle "punches" - assuming hovering is at mid-stick or 50% throttle, you could use 65% power as the average current draw. For the example motor, that would put you at 4.8A of current. Even less that 9.4A.
Does anyone have the logic for how you spec out the proper size ESC for a multi rotor motor/prop configuration?View attachment 15169