RunnerDuck
Member
I've just spent the last three months building my Turnigy HAL Quadcopter with NAZA-M Lite MC using a Taranis X9D Plus transmitter and Taranix X8R receiver.
My first attempt at flying it failed miserably. The problem is I have no roll control to speak of. If I move you stick left or right the motors speed up and slow down as they should.
I made a little video of it that may or may not give you some clues.
I was slowly bringing the power up and it suddenly rolled to the left. I discovered that the front left prop came loose and that's what cause the flip. I tightened all props and tried again.
I gradually applied power and I tried liftoff but it started to roll to the right. I checked the props again and they were OK. It tried again while adding more and more left stick. I tried it in Manual, ATTI and GPS modes to no avail.
One thing I did notice was the LED started flashing red as I got up to speed.
Here's a video from my FPV camera hoping you might find a clue.
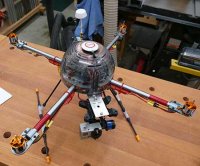
Here's a picture of my quad:
View attachment 22211
My first attempt at flying it failed miserably. The problem is I have no roll control to speak of. If I move you stick left or right the motors speed up and slow down as they should.
I made a little video of it that may or may not give you some clues.
I was slowly bringing the power up and it suddenly rolled to the left. I discovered that the front left prop came loose and that's what cause the flip. I tightened all props and tried again.
I gradually applied power and I tried liftoff but it started to roll to the right. I checked the props again and they were OK. It tried again while adding more and more left stick. I tried it in Manual, ATTI and GPS modes to no avail.
One thing I did notice was the LED started flashing red as I got up to speed.
Here's a video from my FPV camera hoping you might find a clue.
Here's a picture of my quad:
View attachment 22211
")



















