Hello Guys,
I did some new flights, here is the result…
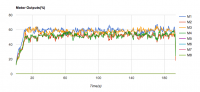
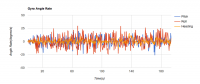
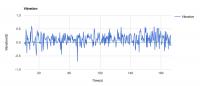
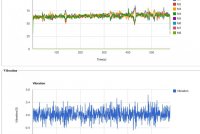
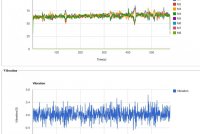
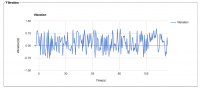
I double checked props and they were very well balanced, then I checked motor alignment as Kloners video, at first site they all looked aligned, but for my frame I tough that it was not so precise, so I did a 4 point calibration using an inclinometer and I found out that I had one motor slightly bad aligned, about 2 to 2.5 degrees the problem was that this 2 degrees where to the opposite direction, like -2 degrees when other motors were like +0.5, I guess if the error was to the same direction like +2.5 degrees it would probably vibrate less… anyway, I re-aligned motors and also I reprogrammed the ESC to Dynamic Braking, and now vibration is under 0.5, so I guess that this is more reasonable, I know I can still fine tune the gains, but right now it feels a lot better. Also today was a bit windy so I didn't wanted to mess with the gains, I went with the rule (if it is working, don't touch it).
I believe that main problem was the motor alignment, but also updating the firmware and using a dynamic braking helped a lot to get a smoother feel of the flight. I didn't tough that the SuperX was this sensitive, now I know to consider motor alignment as a priority.
Here are a couple of logs from todays flight, please let me know what do you think I can fine tune. I am however pleased with the result and I really appreciate all your input and support. I hope I can help you guys as you helped me, thanks again!!
Todays logs:
http://log.xaircraft.com/report.htm#2015_09_01_165214.750_21.1.03.13
http://log.xaircraft.com/report.htm#2015_09_01_165214.750_20.1.05.58
If you want to compare with the flight before motor alignment and Dynamic braking, here is the log from before:
http://log.xaircraft.com/report.htm#2015_09_01_165214.750_19.4.02.05
")