Hi Guys, First post here ")
I've been doing plenty of reading but can't seem to identify a definitive answer. Its a Tarot 680Pro Frame with DJI E600 Motor Set paired with DX8 Radio (Saving for Futaba 14SG)
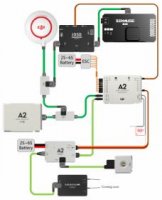
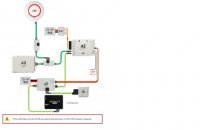
How should I be interconnecting the following hardware:
A2 FC
PMU
IMU
GPS
IOSd MkII
Gimbal H2-3D
Ground Station
Can Bus Hub
I have connected these items in different ways and have had some relatively successful flights, sometimes it seems like the Hex drifts and behave a little erratic but i'm not entirely sure why? Its a Complete DJI system on purpose as to be as compatible as I thought it could be.
Another interesting problem is that if my Zemuse Controler is not connected to the First plug the Gimbal begins to tilt sideways slowly until it hits the limit and makes a nasty motor noise.
Im running the latest firmware that the assistant brings me too which i suppose is 2.3 but i'm not entirely sure and i'm not in town today to check.
Thank you all in advance for your input.
I've been doing plenty of reading but can't seem to identify a definitive answer. Its a Tarot 680Pro Frame with DJI E600 Motor Set paired with DX8 Radio (Saving for Futaba 14SG)
How should I be interconnecting the following hardware:
A2 FC
PMU
IMU
GPS
IOSd MkII
Gimbal H2-3D
Ground Station
Can Bus Hub
I have connected these items in different ways and have had some relatively successful flights, sometimes it seems like the Hex drifts and behave a little erratic but i'm not entirely sure why? Its a Complete DJI system on purpose as to be as compatible as I thought it could be.
Another interesting problem is that if my Zemuse Controler is not connected to the First plug the Gimbal begins to tilt sideways slowly until it hits the limit and makes a nasty motor noise.
Im running the latest firmware that the assistant brings me too which i suppose is 2.3 but i'm not entirely sure and i'm not in town today to check.
Thank you all in advance for your input.
Last edited by a moderator: