FlyEYE
Member
All in all a pretty good 1st test flight, no crash and I had a smile on my face at the end.
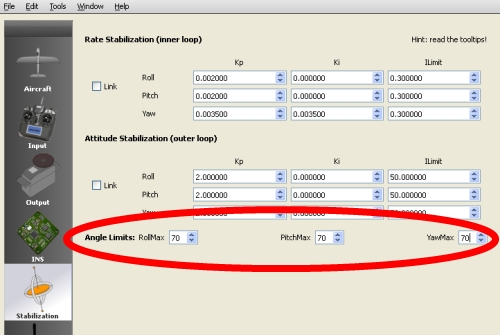
I did however found it very floaty, likely smaller props would help here (it had lots and lots of power tho). The main problem was that it was difficult flying into the wind, I couldn't angle it enough, going with the wind no problem. I felt like I was fighting the stabilization. What should I go about tweaking 1st? Thanks.
RCTimer 2830-14 750KV
1045 EPP props
4500 3S Lipo
View attachment 414
I did however found it very floaty, likely smaller props would help here (it had lots and lots of power tho). The main problem was that it was difficult flying into the wind, I couldn't angle it enough, going with the wind no problem. I felt like I was fighting the stabilization. What should I go about tweaking 1st? Thanks.
RCTimer 2830-14 750KV
1045 EPP props
4500 3S Lipo
View attachment 414

")