Sorry i have to make an alexmos thread.
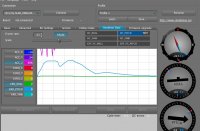
I've tuned multiple gimbles, but i've not run into this problem before. No matter what i do with the PIDS, i get this shape of graph on both pitch and roll error, when moving the gimbal by hand and then releasing.
I have tried different PIDS, and even tried reversing the motors (which strangely made no difference) but i still just get different variations of the same shape.
Any ideas.
View attachment 17524
I've tuned multiple gimbles, but i've not run into this problem before. No matter what i do with the PIDS, i get this shape of graph on both pitch and roll error, when moving the gimbal by hand and then releasing.
I have tried different PIDS, and even tried reversing the motors (which strangely made no difference) but i still just get different variations of the same shape.
Any ideas.
View attachment 17524
") answers in red.
answers in red.