Well this the birth of the Gator. I figured I will give some history of how things got started.
I was browsing the net on RCGroups and came across a photo of a UAV.
I liked the design and I was wondering wether I can build one.
Having tones of time on my hands sitting at home, I figured why not.
I sat down at work and with only a photograph of the copter I design the frames.
Trying to decide what material to use, since carbon and G-10 are so expensive, I searched around the shop and found some
left over pieces of 3mm Lexan.
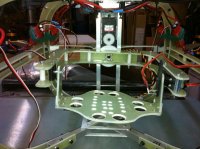
So, I started cutting the frames, shaping and sanding and it turned out pretty good.
Went to Home Depot and got me some 12mm square aluminum tubing and cut the struts.
Everything looked good so far.
I assembled the bird and it had the same look as the photo.
But, I didn't like it. It was too flexible, unbreakable but flexible.
So back to the drawing board I got me some 3mm Dibond.
That stuff is strong, resi poxy sandwiched between two thin layers of aluminum.
I assembled the bird again and no flexing this time.
But I noticed that when I tighten the crews they sunk into the aluminum, too soft.
Darn it anyway, I guess you can have everything..
So, I said what ta heck I came that far I might as well go all the way.
So I ordered 3mm G-10-FR4 from Ontario
That stuff is expensive.
12 square feet for $157.00CND. $190.00 with shipping..
The stuff arrived a few days later.
I cut another set of the frames again....
This time it took a bit longer, G-10 is tough material. Got it done though. went trhough a few drill bits.
Time to search the net. I heard that others had built multis using other means of propultion. I found the answer I was looking
for. A guy by the name Alex built the one I got the photo of. I don't know if he scrapped the project or it didn't fly properly.
To use the controler from the Mikrokopter kopter but use ordinary ESC's, how you say?
A I2c to PWM converter.
A converter that converts the ppm signal so the I2c bus can understand.
I got the controller from Mikrokopter the converter from France the ESC's from HK the motors from all places the Ukraine.
Turnigy 60A Plush series. They are the only controllers that have 400Hz speed which is what you need for the I2c signal.
For motors I got the Pulso 2814/22 760KV
I also got a power distribution board so I can supply power to the ESC's..No way I was gonna sit there and solder a harness to
connect all 8 ESC's together.
For propellers I got the APC 12x6. 4 pushers and 4 tractors.
The assembly began and things fell to place with no effort at all.
The whole thing was assembled without the props of course. Setup the MKtools on my PC. MKtools is a program to calibrate
and adjust the controller, everything is done via the PC.
Communication between the PC and the Bird was done via WI232 modules, they are like bluetooth but better, longer range.
I did the setup of the controller and the timming of the motors. I run the motors one by one via my PC to check rotation.
Setup all the K-values for the altitude and the gyros the aileron and elevator travel adj.
Couple of days ago I strapped the bird on the bench and fired up the motors.
I had to add some trim to the aileron and elevator and everything was set.
Today I did the first test flight and I attached the test stand to prevent any accidents to me or to the bird.
You all saw the results that I posted and I can say I am really happy with the project.
Well this is where I stand. In the near future I will do the maiden flight....I will post...
Do you think is over? nuh...not by long shot.You can say I am crazy or whatever but believe me when I am done Is gonna be
one awesome Multicopter/coaxial.
This project is only the test bed of things to come.
If and I mean IF she flies and can carry the weight of the camera with no glitches at all, I will strip her down and start all over.
Why? you say. I'm glad you asked.
This bird is only for testing of the design and power requirements of the final product.
The final product would be some what smaller. The frame would be made from 1.5mm G-10 and the riggers from 10mm
aluminum. She will have a more aerodynamic shape and of course be much lighter.
I got lots of time to do this so why not?
The new ESC's are on order so as the G-10.
Everything else I got. Patience too.
So friends enjoy the new dimension of UAV's.
I mostly go for the challenge of building something new and from scratch. Everything today is ARF or RTF anybody can do
that. But back in the good old days things were done from ground zero.LOL
Thanks again for you support and input.
Cheers
Bill (zorba)
17/3/2011



") hope you got him to sign a waiver!
hope you got him to sign a waiver!