hate to be that guy here but im running out of ideas....i have a wookong m 5.20 on cinestar 6 frame with the quadrocopter engines hobbyking 30a esc simonk 14 in apc slow fly prop......i have dialed in my gains so that she sits solid as a rock in atti and gps ...but as soon as i get it moving she twitches very little bit once she has returned back to level ( not oscillating)...while in a glide...this happens alot too when some wind hits the frame... even light wind....while she does do her best to stay in her place in the sky...shes really finicky about it...gains are basic 190 190 220 120 atti 130 130...my cog is good i recheck it all the time..my compass has successful calibration everything else works fine...just in the wind shes twichty...and in atti mode once back to leveled flight and in a glide she twitches and sometimes she doesnt...if anyone has any ideas..they are greatly appreciated...im going to change my props tomorrow and see if that does it..... IMU is mounted so that nothing is touching it with vibration dampeners on the pillars so it cant be vibrations...anybody else having this issue?
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
how to get rid of twitchy behavior??!!
- Thread starter edykosta
- Start date
PeterLester
Member
The WKM was developed within anticipated boundaries of normal payload weight on the standard S800 MR airframe. A lot of DIY pilot builders are attempting to use it on their own or alternate 800 mm airframes and/or with heavier payloads. Here is what I found about this so far:
The new bluetooth, IPhone application allows for remote adjustment of the recently added "Advanced parameters" in the App for WKM Assistant.
However they are not configurable from an RC transmitter since X2 and X2 configuration is not allowed for these.
Here is some additional information I was able to track down for a DJI Wiki support site which is located here:
http://www.dji-innovations.com/what-...ter-gain-mean/
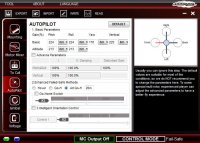
2. Advanced Parameters (Only WooKong-M series has advanced parameters)
Usually you can ignore this step. The default values are suitable for most of the conditions, so we do NOT recommend you to change the parameters here. To some special multi rotor, experienced user can adjust the advanced parameters to have a better fly experience.
1) I.... The error compensation rate in aircraft static case.
2) V.Damping
Only work in the GPS mode.
The larger the number, the brake of the aircraft will be more powerful after releasing the joystick. At the same time the maximum velocity achieved at the full-scale will become smaller.
The smaller the number, the brake of the aircraft will be more soft and need longer time. At the same time the maximum velocity achieved at the full-scale will become larger.
Too large or too small may lead to the hover instability in the GPS mode.
3) Disturbed Gain
Only for special extreme GPS circumstances. please remain default parameter.
View attachment 11532
The new bluetooth, IPhone application allows for remote adjustment of the recently added "Advanced parameters" in the App for WKM Assistant.
However they are not configurable from an RC transmitter since X2 and X2 configuration is not allowed for these.
Here is some additional information I was able to track down for a DJI Wiki support site which is located here:
http://www.dji-innovations.com/what-...ter-gain-mean/
2. Advanced Parameters (Only WooKong-M series has advanced parameters)
Usually you can ignore this step. The default values are suitable for most of the conditions, so we do NOT recommend you to change the parameters here. To some special multi rotor, experienced user can adjust the advanced parameters to have a better fly experience.
1) I.... The error compensation rate in aircraft static case.
2) V.Damping
Only work in the GPS mode.
The larger the number, the brake of the aircraft will be more powerful after releasing the joystick. At the same time the maximum velocity achieved at the full-scale will become smaller.
The smaller the number, the brake of the aircraft will be more soft and need longer time. At the same time the maximum velocity achieved at the full-scale will become larger.
Too large or too small may lead to the hover instability in the GPS mode.
3) Disturbed Gain
Only for special extreme GPS circumstances. please remain default parameter.
View attachment 11532
hate to be that guy here but im running out of ideas....i have a wookong m 5.20 on cinestar 6 frame with the quadrocopter engines hobbyking 30a esc simonk 14 in apc slow fly prop......i have dialed in my gains so that she sits solid as a rock in atti and gps ...but as soon as i get it moving she twitches very little bit once she has returned back to level ( not oscillating)...while in a glide...this happens alot too when some wind hits the frame... even light wind....while she does do her best to stay in her place in the sky...shes really finicky about it...gains are basic 190 190 220 120 atti 130 130...my cog is good i recheck it all the time..my compass has successful calibration everything else works fine...just in the wind shes twichty...and in atti mode once back to leveled flight and in a glide she twitches and sometimes she doesnt...if anyone has any ideas..they are greatly appreciated...im going to change my props tomorrow and see if that does it..... IMU is mounted so that nothing is touching it with vibration dampeners on the pillars so it cant be vibrations...anybody else having this issue?
Attachments
Last edited by a moderator:
PeterLester
Member
Also I would like to suggest the removal of expensive payload from your MR and flying in a remote area away from vehicles, people and buildings until you get this issue resolved.
hate to be that guy here but im running out of ideas....i have a wookong m 5.20 on cinestar 6 frame with the quadrocopter engines hobbyking 30a esc simonk 14 in apc slow fly prop......i have dialed in my gains so that she sits solid as a rock in atti and gps ...but as soon as i get it moving she twitches very little bit once she has returned back to level ( not oscillating)...while in a glide...this happens alot too when some wind hits the frame... even light wind....while she does do her best to stay in her place in the sky...shes really finicky about it...gains are basic 190 190 220 120 atti 130 130...my cog is good i recheck it all the time..my compass has successful calibration everything else works fine...just in the wind shes twichty...and in atti mode once back to leveled flight and in a glide she twitches and sometimes she doesnt...if anyone has any ideas..they are greatly appreciated...im going to change my props tomorrow and see if that does it..... IMU is mounted so that nothing is touching it with vibration dampeners on the pillars so it cant be vibrations...anybody else having this issue?
Hi edykosta,
For me your gains looks a bit high and props propably too big. Wkm has never been a good friend with slow flyers, have you tried different props? Xoar 12x6 or 13x6,5 would be better choise dependening your payload.
I have similar setup cs6 with wkm and it flies very well.
Best,
Kari
For me your gains looks a bit high and props propably too big. Wkm has never been a good friend with slow flyers, have you tried different props? Xoar 12x6 or 13x6,5 would be better choise dependening your payload.
I have similar setup cs6 with wkm and it flies very well.
Best,
Kari
Thanks to everyone so far who have responded i appreciate your time....i am not flying with my payload and i fly only in big open fields alone...this hobby has enough negative publicity that we all have to worry about...i do have smaller e props...thin electric...will try them today...kari, you say my gains are too high...what are your gains?? i have attached my x3 on my dx8 to the gains and have made it so that the copter returns back to leveled flight smoothly...in gps and atti works quite well....the little bit of twitchy bahavior in wind makes it difficult for my gimbal stabilizer to be effective making my raw footage in heavy need of stab... Will report back later today.will be using graupner 28-12,5cm/11-5 e prop
PeterLester
Member
To help, we need you to provide additional information. Are you flying this on the F550 or Quad or S800 or equivalent airframe.......?
These factors will have an effect on your MR behaviour as well underpowered motors for 800 size airframe.
These factors will have an effect on your MR behaviour as well underpowered motors for 800 size airframe.
hate to be that guy here but im running out of ideas....i have a wookong m 5.20 on cinestar 6 frame with the quadrocopter engines hobbyking 30a esc simonk 14 in apc slow fly prop......i have dialed in my gains so that she sits solid as a rock in atti and gps ...but as soon as i get it moving she twitches very little bit once she has returned back to level ( not oscillating)...while in a glide...this happens alot too when some wind hits the frame... even light wind....while she does do her best to stay in her place in the sky...shes really finicky about it...gains are basic 190 190 220 120 atti 130 130...my cog is good i recheck it all the time..my compass has successful calibration everything else works fine...just in the wind shes twichty...and in atti mode once back to leveled flight and in a glide she twitches and sometimes she doesnt...if anyone has any ideas..they are greatly appreciated...im going to change my props tomorrow and see if that does it..... IMU is mounted so that nothing is touching it with vibration dampeners on the pillars so it cant be vibrations...anybody else having this issue?
PeterLester
Member
Oops...... eyes scanned over it too quickly....... looks like an 800 mm diameter MR. But can you tell me more about the "quadracopter engines"? If they are the DJI F450 motors they are too small for the 800 dia airframe and you will get wobble. If they are Cinestar kit motors I would have to dig deeper.
Peter lester... The info you need is in the first post...cinestar 6 frame quadropower motor qc 3328 etc...reference first post...much appreciated
Here is the info regarding the engines ...
Description
We are proud to announce our new and very own brand of motor, the QuadroPower QC-3328, especially developed for Multi-rotor applications. Unprecedented power-to-weight ratio, outperforming everything else in its class.
QC-3328 motor is the superior motor for multi-rotor UAS installations.
Field proven and won't let you down on the job.
Technical Info
• Lithium cell count: 3-6
• Load current: max. 30A
• Maximum load current. (15 sec): 50 A
• No-load speed: 700 rpm / V
• Recommended Propeller Size: 10" .. 14"
• Mechanical power: 350 W
• Thrust max.: 2200 g
• Wire length: about 60cm
• Total weight (without cable): approx 105g (139g with prop adapters, 600mm wires, and bullet connectors)
• Dimensions: h=33.5mm, d=28mm
• Shaft diameter: 6mm
• 0.2mm stator laminations for low eddy current losses (lower Io compared to leading competitor motors for higher efficiency)
• High strength Neodymium magnets (lower Rm than leading competitor motors for more power)
• Genuine EZO japanese ball bearings
• Hardened & polished shaft
• Highest quality CNC machining in the industry
• Dual mechanical magnet retention (even if there is an adhesive failure, magnets will not dislodge)
• Pre-installed prop adapter and bullet connectors (plug & play motor)
• All-black finish for a professional looking installation
• 600mm long 16ga heavy duty motor wires ready for multi-rotor applications
• Short shaft design for interference-free installations
Description
We are proud to announce our new and very own brand of motor, the QuadroPower QC-3328, especially developed for Multi-rotor applications. Unprecedented power-to-weight ratio, outperforming everything else in its class.
QC-3328 motor is the superior motor for multi-rotor UAS installations.
Field proven and won't let you down on the job.
Technical Info
• Lithium cell count: 3-6
• Load current: max. 30A
• Maximum load current. (15 sec): 50 A
• No-load speed: 700 rpm / V
• Recommended Propeller Size: 10" .. 14"
• Mechanical power: 350 W
• Thrust max.: 2200 g
• Wire length: about 60cm
• Total weight (without cable): approx 105g (139g with prop adapters, 600mm wires, and bullet connectors)
• Dimensions: h=33.5mm, d=28mm
• Shaft diameter: 6mm
• 0.2mm stator laminations for low eddy current losses (lower Io compared to leading competitor motors for higher efficiency)
• High strength Neodymium magnets (lower Rm than leading competitor motors for more power)
• Genuine EZO japanese ball bearings
• Hardened & polished shaft
• Highest quality CNC machining in the industry
• Dual mechanical magnet retention (even if there is an adhesive failure, magnets will not dislodge)
• Pre-installed prop adapter and bullet connectors (plug & play motor)
• All-black finish for a professional looking installation
• 600mm long 16ga heavy duty motor wires ready for multi-rotor applications
• Short shaft design for interference-free installations
PeterLester
Member
Those are very good motors but the thrust level might be a bit low for an 800 mm diameter Hex MR airframe IMHO......
The reason I say this is because I am using 320 watt motors on an 800 mm diameter MR airframe and have to go into WKM advanced parameters to get rid of the wobble in light breezes.
Here are the motors I am using..... wish I had data on the thrust which is more representative of what we should be focusing on.
http://www.hobbyking.com/hobbyking/..._4822_690Kv_22Pole_Multi_Rotor_Outrunner.html
Another local flyer is using these 650 watt motors on the same airframe and there is no wobble even when using 4S versus the recommended 6S batteries.
http://www.hobbyking.com/hobbyking/..._4830_420Kv_22Pole_Multi_Rotor_Outrunner.html
The reason I say this is because I am using 320 watt motors on an 800 mm diameter MR airframe and have to go into WKM advanced parameters to get rid of the wobble in light breezes.
Here are the motors I am using..... wish I had data on the thrust which is more representative of what we should be focusing on.
http://www.hobbyking.com/hobbyking/..._4822_690Kv_22Pole_Multi_Rotor_Outrunner.html
Another local flyer is using these 650 watt motors on the same airframe and there is no wobble even when using 4S versus the recommended 6S batteries.
http://www.hobbyking.com/hobbyking/..._4830_420Kv_22Pole_Multi_Rotor_Outrunner.html
Here is the info regarding the engines ...
Description
We are proud to announce our new and very own brand of motor, the QuadroPower QC-3328, especially developed for Multi-rotor applications. Unprecedented power-to-weight ratio, outperforming everything else in its class.
QC-3328 motor is the superior motor for multi-rotor UAS installations.
Field proven and won't let you down on the job.
Technical Info
• Lithium cell count: 3-6
• Load current: max. 30A
• Maximum load current. (15 sec): 50 A
• No-load speed: 700 rpm / V
• Recommended Propeller Size: 10" .. 14"
• Mechanical power: 350 W
• Thrust max.: 2200 g
• Wire length: about 60cm
• Total weight (without cable): approx 105g (139g with prop adapters, 600mm wires, and bullet connectors)
• Dimensions: h=33.5mm, d=28mm
• Shaft diameter: 6mm
• 0.2mm stator laminations for low eddy current losses (lower Io compared to leading competitor motors for higher efficiency)
• High strength Neodymium magnets (lower Rm than leading competitor motors for more power)
• Genuine EZO japanese ball bearings
• Hardened & polished shaft
• Highest quality CNC machining in the industry
• Dual mechanical magnet retention (even if there is an adhesive failure, magnets will not dislodge)
• Pre-installed prop adapter and bullet connectors (plug & play motor)
• All-black finish for a professional looking installation
• 600mm long 16ga heavy duty motor wires ready for multi-rotor applications
• Short shaft design for interference-free installations
PeterLester
Member
1) Make sure your basic and attitude gains are optimized for easy flying in no wind before proceeding with advanced gains.
2) Take note of the default values in advanced variables and store that data for later recovery.
3) Never adjust the disturbed gain
4) Note that the top row of advanced adjustments apply to pitch and roll....... start there with the I variable.
5) Adjust the "I" variable up or down in 5% increments and test fly each time the variable is changed on your workbench with WKM Assistant.
If there is no improvements then return the value to default and move on to the V damping variable and do the same.
PS: I haven't tried this yet and I have another MR needing to be fixed first so it might be awhile before I can comment further.
BTW: This is something that distinguishes a good DJI vendor from a poor one.
In USA - UAV Products will probably be one of the first vendors to know what to do here.
2) Take note of the default values in advanced variables and store that data for later recovery.
3) Never adjust the disturbed gain
4) Note that the top row of advanced adjustments apply to pitch and roll....... start there with the I variable.
5) Adjust the "I" variable up or down in 5% increments and test fly each time the variable is changed on your workbench with WKM Assistant.
If there is no improvements then return the value to default and move on to the V damping variable and do the same.
PS: I haven't tried this yet and I have another MR needing to be fixed first so it might be awhile before I can comment further.
BTW: This is something that distinguishes a good DJI vendor from a poor one.
In USA - UAV Products will probably be one of the first vendors to know what to do here.
So how did you fix in advanced parameters??? Never really played with that feature...
Edykosta,
I'm using same motors as you and they are good fit for CineStar. Actually the QC3328 are rebranded Tiger MT2814. What is the AUW of your setup and which cell count lipos? If you are under 5kg AUW i'm sure you're on the safe side with QC3328, but i'd use slightly smaller props than 14". At least for me using Xoar 14X5 they got slightly too warm with 4S, but 12-13" are just fine for my setup. My experience with slow flyers with wookong are that that they are like poison, never worked well unlike with other controllers (for example YS-X6) have had good success with SFs. Before changing advanced parameters i think you should get it fly "mechanically" well first. What i've noticed with all my setups they either fly well or not close to default parameters. If they are not flying well from beginning they need mechanical changes") Right now my Cinestar 6 has gains 135/135/140/130 and attis are around 105. If it's calm i can tighten gains a bit but for gusty weather these settings works well for me. (I have also lowered P/R I values a bit, it will smoothen, but it will only help if everything else is working well and tuned, and in certain situations only so do that last if you want to try) Also important, make sure your motor bolts are not too long and have not ruined windings inside motors, i know few times it has been explanation for weird twitchy flying.
Right now my Cinestar 6 has gains 135/135/140/130 and attis are around 105. If it's calm i can tighten gains a bit but for gusty weather these settings works well for me. (I have also lowered P/R I values a bit, it will smoothen, but it will only help if everything else is working well and tuned, and in certain situations only so do that last if you want to try) Also important, make sure your motor bolts are not too long and have not ruined windings inside motors, i know few times it has been explanation for weird twitchy flying.
I'm using same motors as you and they are good fit for CineStar. Actually the QC3328 are rebranded Tiger MT2814. What is the AUW of your setup and which cell count lipos? If you are under 5kg AUW i'm sure you're on the safe side with QC3328, but i'd use slightly smaller props than 14". At least for me using Xoar 14X5 they got slightly too warm with 4S, but 12-13" are just fine for my setup. My experience with slow flyers with wookong are that that they are like poison, never worked well unlike with other controllers (for example YS-X6) have had good success with SFs. Before changing advanced parameters i think you should get it fly "mechanically" well first. What i've noticed with all my setups they either fly well or not close to default parameters. If they are not flying well from beginning they need mechanical changes
Right now my Cinestar 6 has gains 135/135/140/130 and attis are around 105. If it's calm i can tighten gains a bit but for gusty weather these settings works well for me. (I have also lowered P/R I values a bit, it will smoothen, but it will only help if everything else is working well and tuned, and in certain situations only so do that last if you want to try) Also important, make sure your motor bolts are not too long and have not ruined windings inside motors, i know few times it has been explanation for weird twitchy flying.Right now im only flying the cinestar 6frame with 3axis gimbal on it with zippy 8000 mah 4s batt....so whatever weight that is...however i do fly the canon 7d dslr camera and sony. Nex7.... I have lifted these cameras just fine no hot engines and escs stay cool....just mounted up graupner 11.5...just waiting for an open field ....the copter flys just fine...it really does gps is solid will not move and atti is great too...just whenever it levels back while in a glide she twitches a bit and is picked up on camera. Not the results i want from raw footage. Will try to fly today and post results. Peter lester thanks for taking the time to ... Kari your website is awesome. Thanks for the help
ok so i went out and tried with smaller props....conclusion
this thing now flys like double cream resting on a bed of honey....oh yeah..... its perfect.
smaller prop size was definitely the way to go....incredibly smooth flight even during fast descent.....remarkably better.
thanks for all the help from everyone that gave input. hope this thread can help and save someone a lot of time in the future
cheers !
this thing now flys like double cream resting on a bed of honey....oh yeah..... its perfect.
smaller prop size was definitely the way to go....incredibly smooth flight even during fast descent.....remarkably better.
thanks for all the help from everyone that gave input. hope this thread can help and save someone a lot of time in the future
cheers !
PeterLester
Member
Just more evidence that MulitForums is worth it's weight in gold for teamwork solutions to problems that even the best vendors/dealers might not be able to solve.
I my case today MRForums helped me to resolve a serious two week control problem with my smaller F550 with Naza controller.....
issue was vibration causing serious flying problems and it was solved by:
a) using Kyosho Zeal tape to isolate the Naza Controller from MR airframe vibration......
b) switching from APC 10x5 Eprops to APC 10x4.7 slow fly props.
Test flight was absolute perfection!:tennis:
I my case today MRForums helped me to resolve a serious two week control problem with my smaller F550 with Naza controller.....
issue was vibration causing serious flying problems and it was solved by:
a) using Kyosho Zeal tape to isolate the Naza Controller from MR airframe vibration......
b) switching from APC 10x5 Eprops to APC 10x4.7 slow fly props.
Test flight was absolute perfection!:tennis:
ok so i went out and tried with smaller props....conclusion
this thing now flys like double cream resting on a bed of honey....oh yeah..... its perfect.
smaller prop size was definitely the way to go....incredibly smooth flight even during fast descent.....remarkably better.
thanks for all the help from everyone that gave input. hope this thread can help and save someone a lot of time in the future
cheers !
bson
Member
Hi edykosta!
Coming in late in the thread, but found it googling around desperately for hints to solve my problems. I'm having a very similar setup as you, CS6, WKM, 700kV motors and APC 14x4.7. It is getting quite nervous in the slightest wind and often to the extent that my brushless gimbal cannot absorb the twitches.
When your "double cream ended up on the bed of honey", what propellers did you have (make and size), how many battery cells, the total weight (AUW) and what gains in your WKM did you have.
I would really appreciate if you could share this info to end my fight against these problems.
Many thanks in advance!
Regards,
Björn
Coming in late in the thread, but found it googling around desperately for hints to solve my problems. I'm having a very similar setup as you, CS6, WKM, 700kV motors and APC 14x4.7. It is getting quite nervous in the slightest wind and often to the extent that my brushless gimbal cannot absorb the twitches.
When your "double cream ended up on the bed of honey", what propellers did you have (make and size), how many battery cells, the total weight (AUW) and what gains in your WKM did you have.
I would really appreciate if you could share this info to end my fight against these problems.
Many thanks in advance!
Regards,
Björn
PeterLester
Member
I had similar problems with a custom designed S800 clone...... it would wobble badly in the slightest breeze regardless of Gains settings.
In my case I upsized the motors from the the 490kv to the more expensive 420KV that also have extra torque and all issues disappeared.
I still use the newer 420kv on my Cinestar 8...
https://www.hobbyking.com/hobbyking..._4822_490Kv_22Pole_Multi_Rotor_Outrunner.html
https://www.hobbyking.com/hobbyking..._4830_420Kv_22Pole_Multi_Rotor_Outrunner.html
I think this issue has something to do with the motor torque to motor weight ratio......
higher ratio enables the FC control output to do its job....
In my case I upsized the motors from the the 490kv to the more expensive 420KV that also have extra torque and all issues disappeared.
I still use the newer 420kv on my Cinestar 8...
https://www.hobbyking.com/hobbyking..._4822_490Kv_22Pole_Multi_Rotor_Outrunner.html
https://www.hobbyking.com/hobbyking..._4830_420Kv_22Pole_Multi_Rotor_Outrunner.html
I think this issue has something to do with the motor torque to motor weight ratio......
higher ratio enables the FC control output to do its job....
Hi edykosta!
Coming in late in the thread, but found it googling around desperately for hints to solve my problems. I'm having a very similar setup as you, CS6, WKM, 700kV motors and APC 14x4.7. It is getting quite nervous in the slightest wind and often to the extent that my brushless gimbal cannot absorb the twitches.
When your "double cream ended up on the bed of honey", what propellers did you have (make and size), how many battery cells, the total weight (AUW) and what gains in your WKM did you have.
I would really appreciate if you could share this info to end my fight against these problems.
Many thanks in advance!
Regards,
Björn
Peter.D
New Member
Hi guys, coming in extra late here.. had a scary flight last weekend on my cinestar 8. About 20 seconds into the flight it twitched, then twitched again. At first I thought the second twitch was me over compensating on the controls but then it kept twitching and started oscillating/ not really listening to my inputs. This flight was the first in a while as we were previously battling the yaw motor on our 3 axis gimbal (which I also believed had caused the oscillation, but my gimbal op was confused as to what I was hollering about because on his screen the image was rock solid, so that still works). Was very grateful to land it right side up, just 2 chipped props from tipping after touch down.
So anyways --- I've discovered the compass data off the iosd was completely out of whack, so I'll recalibrate that. But the only change I had made to the airframe between flights was installing a 900 mhz datalink, would this require a compass calibration? I'm more worried about my gains at this point (also haven't been changed since purchase, but used to fly beautifully), and how applicable it will be to adjust them while flying without a gimbal/ how to transfer gains onto a heavier set up (with gimbal). I could also use some balancing tips for finding Z axis CG of the airframe... I've built new battery mounts so they sit on booms 3 and 7 instead of on the very top of everything. I figure this will help for gimballess flying, but with a gimbal will the cg be too low? I imagine this would cause more means for oscillation from the pendulum effect it would likely create, but I really don't know.
Any help is greatly appreciated. Super glad this website is here.
Set up: Cinestar 8 with DJI WKM. Tiger motor U5 400 kv, xoar 16x5 props, 60 amp esc, 2x zippy 8000 6s parallel,
freefly 3 axis brushless gimbal.
-Peter
So anyways --- I've discovered the compass data off the iosd was completely out of whack, so I'll recalibrate that. But the only change I had made to the airframe between flights was installing a 900 mhz datalink, would this require a compass calibration? I'm more worried about my gains at this point (also haven't been changed since purchase, but used to fly beautifully), and how applicable it will be to adjust them while flying without a gimbal/ how to transfer gains onto a heavier set up (with gimbal). I could also use some balancing tips for finding Z axis CG of the airframe... I've built new battery mounts so they sit on booms 3 and 7 instead of on the very top of everything. I figure this will help for gimballess flying, but with a gimbal will the cg be too low? I imagine this would cause more means for oscillation from the pendulum effect it would likely create, but I really don't know.
Any help is greatly appreciated. Super glad this website is here.
Set up: Cinestar 8 with DJI WKM. Tiger motor U5 400 kv, xoar 16x5 props, 60 amp esc, 2x zippy 8000 6s parallel,
freefly 3 axis brushless gimbal.
-Peter
Last edited by a moderator: