Hello everyone,
I'm converting my Flat Hexa to Y6 configuration. MKTool doesn't provide official Y6 mixer table, there are some mixer tables out there including this: http://www.mikrokopter.de/ucwiki/mkm
Motor alignment:
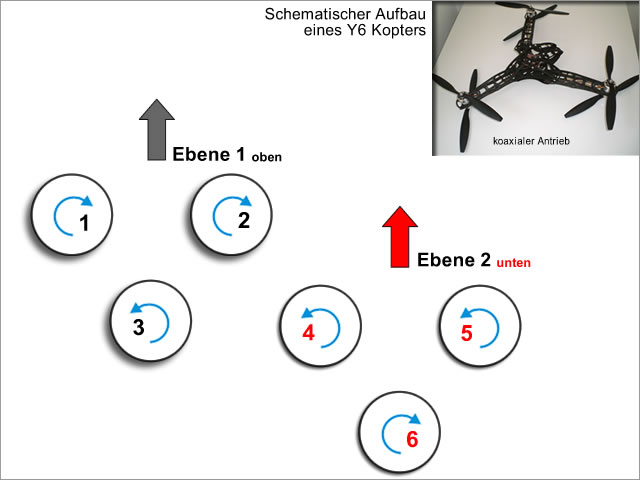
So, there are two important parts as far as I read:
* Mixer table
* Prop selection
jes1111 wrote a good post on OP forums about prop selection: http://forums.openpilot.org/topic/5631-props-for-y6/
So, in theory bottom props should have higher pitch values than the top ones.
So here are my quesitons:
* What are your mixer settings for your Y6 setup? (Did you change the standart MKM file provided in the .de site? )
* What are your prop selection?
I hope this thread helps for those building a Y6.
I'm converting my Flat Hexa to Y6 configuration. MKTool doesn't provide official Y6 mixer table, there are some mixer tables out there including this: http://www.mikrokopter.de/ucwiki/mkm
Motor alignment:
So, there are two important parts as far as I read:
* Mixer table
* Prop selection
jes1111 wrote a good post on OP forums about prop selection: http://forums.openpilot.org/topic/5631-props-for-y6/
So, in theory bottom props should have higher pitch values than the top ones.
So here are my quesitons:
* What are your mixer settings for your Y6 setup? (Did you change the standart MKM file provided in the .de site? )
* What are your prop selection?
I hope this thread helps for those building a Y6.
") )
)



