Mactadpole
Member
I guess the first question is where is the "front" on your frame in relation to the posted diagrams. I had mine configured per the first diagram and used the attached .mkm file.
View attachment 828
You can certainly have other orientations but you'll need to modify the .mkm file accordingly to get the motor spin direction correct, no guarantee on what that might/might not do to flight stability, I've never tried it myself.
Ken
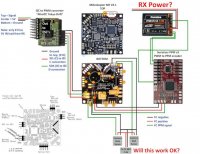
I have the MK FC mounted like the last diagram (arrow on board [front] is straight up) and the rotation of my motors follows the last diagram as well. Basically the board orientation is the same but the motor direction is exactly opposite the first MK diagram below.

Is it the +/- values which control this?
Really hope I don't have to change things up.
Thanks,
Shawn