MombasaFlash
Heli's & Tele's bloke
The first flight test attempt was rubbish with the MK Octo wanting to Pitch, Roll and Yaw all at the same time.
The initial level test (Throttle high/Rudder right) and the Compass Calibration were both redone - several times.
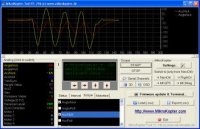
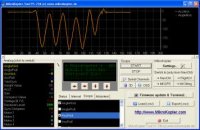
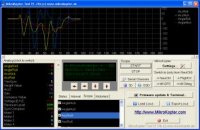
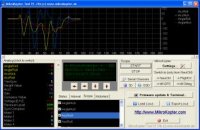
Yesterday the Roll and Yaw axes looked as if they were going to behave but the Pitch axis (sorry, NICK - pah, BS) was ridiculous and patently uncontrollable. It appears to be far too slow to react to being off-level and when it does finally correct it way-over-reacts ... and then takes far too long to realise it has gone too far. If the Octo were allowed to attain any altitude the resulting flight would be a jolly event with an ever increasingly violent and jerky forwards & backwards seesaw.
As it would inevitably end up bent, so I have not allowed it get above a few inches yet - although even then it has ended up on its back several times.
Of course EVERYBODY is stupid some of the time but I cannot find any physical assembly mistakes i.e. clockwise/anticlockwise assignment for the motors and wiring from motors to BL-Ctrl's (verified in KopterTool with the individual motor test facility). The Configuration Setting is the straightforward default 'Beginners' configuration or the same with GPS and Compass disabled (Altitude is already disabled by default).
I have no idea which numbers should be changed within KopterTool to smarten up the Pitch axis performance - remember, the Roll and Yaw axes appear to be relatively stable, it is only the Pitch axis which is so obviously wrong - but then, when I am told here on this forum that the default 'Beginners' configuration is sufficient to permit the MK to get off the ground and keep itself under control, why should anything have to be changed at all?
The initial level test (Throttle high/Rudder right) and the Compass Calibration were both redone - several times.
Yesterday the Roll and Yaw axes looked as if they were going to behave but the Pitch axis (sorry, NICK - pah, BS) was ridiculous and patently uncontrollable. It appears to be far too slow to react to being off-level and when it does finally correct it way-over-reacts ... and then takes far too long to realise it has gone too far. If the Octo were allowed to attain any altitude the resulting flight would be a jolly event with an ever increasingly violent and jerky forwards & backwards seesaw.
As it would inevitably end up bent, so I have not allowed it get above a few inches yet - although even then it has ended up on its back several times.
Of course EVERYBODY is stupid some of the time but I cannot find any physical assembly mistakes i.e. clockwise/anticlockwise assignment for the motors and wiring from motors to BL-Ctrl's (verified in KopterTool with the individual motor test facility). The Configuration Setting is the straightforward default 'Beginners' configuration or the same with GPS and Compass disabled (Altitude is already disabled by default).
I have no idea which numbers should be changed within KopterTool to smarten up the Pitch axis performance - remember, the Roll and Yaw axes appear to be relatively stable, it is only the Pitch axis which is so obviously wrong - but then, when I am told here on this forum that the default 'Beginners' configuration is sufficient to permit the MK to get off the ground and keep itself under control, why should anything have to be changed at all?
")