DenisDespair
Member
Hello.
I've already asked some silly questions in the photography tread. After some reading I've decided to built my own copter from parts. It will be used for still landscape photography with Sony NEX6 + 16-50 lens.
All criticism and suggestions for improvements are VERY WELCOME, just keep in mind somewhat limited budget. Here are details worth 1.5k USD without VAT. Probably, a couple of hundreds can be added if needed. But I would very much like to use ready-made solutions, without soldering or programming.
Frame
Tharot FY680
HML650 landing gear
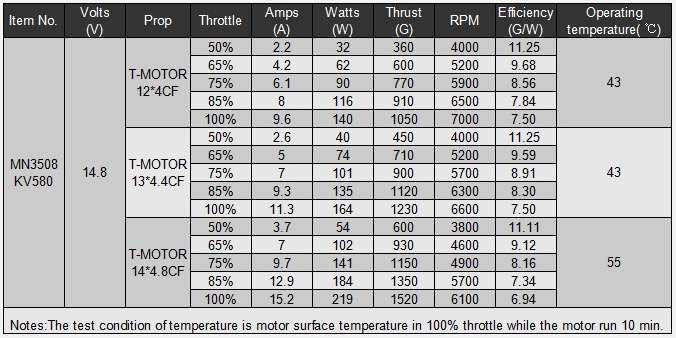
Motors
I don't understand anything about motors and props and their compatibility. If you can suggest anything better - let me know
Turnigy 3508-580KV motors
12x4.5 SF carbon props
Afro ESC 30
Copter power supply
Turnigy 4s 5000mAh battery or can"bigger"12Ah battery be better? It has more energy but heavier. Does it improve flying time?
iMax charger
iMax Charger power supply
Camera gimbal
Storm Eye Gimbal for 5N
Quanum 4008 motors
Gimbal control board
Do I need any separate receiver for this board?
Copter electronics
DJI Naza M V2
Do I understand correctly that thiz Naza already has control board, so I don't need an extra one? Do I need some laptop to program this Naza controller in the field?
Copter transmitter Turnigy 9XR
Copter transmitter battery 3s 2200mAh
Copter receiver
FPV
Camera transmitter TGYi6
Sony HDMI converter + IR shutter release
AV transmitter FatShark
Monitor with receiver
Monitor battery
Monitor mount
Are there any possibility to see video on my android phone instead of carrying separate screen?
Thanks to everybody for comments!
I've already asked some silly questions in the photography tread. After some reading I've decided to built my own copter from parts. It will be used for still landscape photography with Sony NEX6 + 16-50 lens.
All criticism and suggestions for improvements are VERY WELCOME, just keep in mind somewhat limited budget. Here are details worth 1.5k USD without VAT. Probably, a couple of hundreds can be added if needed. But I would very much like to use ready-made solutions, without soldering or programming.
Frame
Tharot FY680
HML650 landing gear
Motors
I don't understand anything about motors and props and their compatibility. If you can suggest anything better - let me know
Turnigy 3508-580KV motors
12x4.5 SF carbon props
Afro ESC 30
Copter power supply
Turnigy 4s 5000mAh battery or can"bigger"12Ah battery be better? It has more energy but heavier. Does it improve flying time?
iMax charger
iMax Charger power supply
Camera gimbal
Storm Eye Gimbal for 5N
Quanum 4008 motors
Gimbal control board
Do I need any separate receiver for this board?
Copter electronics
DJI Naza M V2
Do I understand correctly that thiz Naza already has control board, so I don't need an extra one? Do I need some laptop to program this Naza controller in the field?
Copter transmitter Turnigy 9XR
Copter transmitter battery 3s 2200mAh
Copter receiver
FPV
Camera transmitter TGYi6
Sony HDMI converter + IR shutter release
AV transmitter FatShark
Monitor with receiver
Monitor battery
Monitor mount
Are there any possibility to see video on my android phone instead of carrying separate screen?
Thanks to everybody for comments!

")