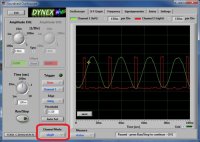
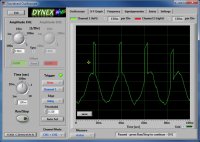
I've got a few questions about 4 point balancing. First, when getting a balance solution I've been running into two issues. One will give me a negative angle. For example, .121g or weight at -112 degrees. I'm simply using a polar chart for strobe balancing with the motor diameter cut out to asset in the 0, 120 and 240 positions. The increase in degrees from 0 to 360 in a counter clockwise rotations... So if I get a negative solution, do I just measure out for the example the -112 degrees, 112 clockwise from zero? The other thing, even though I've got a sine wave after filtering my waveform it's fluctuating a fair bit. Should I just take the max value I see in the scope display at the top or try to average it out? The second issue I'm having is sometime the solution brings up a window stating there's too much vibration and to use a smaller weight... I get the weight down so small it's hard to even measure but I'll get the same dialog saying to go smaller lol! Any ideas on that?