Hi All
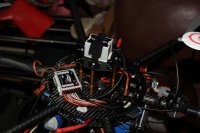
I have wired the positive and negative ESC, feeds in to two clusters, so doing away with the need for a distribution board. Would this cause the bad status light to come on more often?? And how often should it come on??
This is our set up:
AD6 HL
DJI Wookong M
30amp ESC's
Torxpower motors
13/6.5 props
No vibration shows on video now as I have balanced the props. The ESC's are tucked between the main mount plates and the electrics are all under the bottom plate. I did this to keep the risk of noise down to a minimum! The IMU is directly in the middle and the GPS is 5" aft on the rear motor boom to the middle of the IMU.
The UAV, works well in 0 wind but even the slightest wind turns it in to a crazy machine and the white lights start, 2, then 3 lights at a time. in GPS, it wonders up to 1.5mtrs across and 1mtr up and down so it's hunting for a fix even though there are no red lights, so a good gps status!
Radio's
2.4ghz to operate the AD6.
2.4ghz to operate the gimble.
900Mhz video to ground live feed.
Hope you can help guys.
Thanks in advance for all your advise cheers Dominic
I have wired the positive and negative ESC, feeds in to two clusters, so doing away with the need for a distribution board. Would this cause the bad status light to come on more often?? And how often should it come on??
This is our set up:
AD6 HL
DJI Wookong M
30amp ESC's
Torxpower motors
13/6.5 props
No vibration shows on video now as I have balanced the props. The ESC's are tucked between the main mount plates and the electrics are all under the bottom plate. I did this to keep the risk of noise down to a minimum! The IMU is directly in the middle and the GPS is 5" aft on the rear motor boom to the middle of the IMU.
The UAV, works well in 0 wind but even the slightest wind turns it in to a crazy machine and the white lights start, 2, then 3 lights at a time. in GPS, it wonders up to 1.5mtrs across and 1mtr up and down so it's hunting for a fix even though there are no red lights, so a good gps status!
Radio's
2.4ghz to operate the AD6.
2.4ghz to operate the gimble.
900Mhz video to ground live feed.
Hope you can help guys.
Thanks in advance for all your advise cheers Dominic

")



