i picked up a (cheap, I think) s800, wkm, two li-po batteries, and futaba 8j transmitter to do some aerial photography. not video. i'll be using a custom mount for the camera setup which weight about 2.5lb. I don't need a video downlink, gimbals or servos, etc. i'm not too concerned yet about vibration as the shutter speeds will be very high, but i may look into dampening later. i put most of the kit together today and have some questions.
i had to replace the connectors on the batteries with xt60s which i found at another local shop (the place i bought the gear was out of stock.) to run two batteries, i assume i'll need a y-adapter and also another battery tray? without a second tray, it seems strange that the standard battery tray puts such a heavy object so far off center. is that really OK!??! i'm also not clear what the preferred way to power the PMU is. another splice from the batteries?
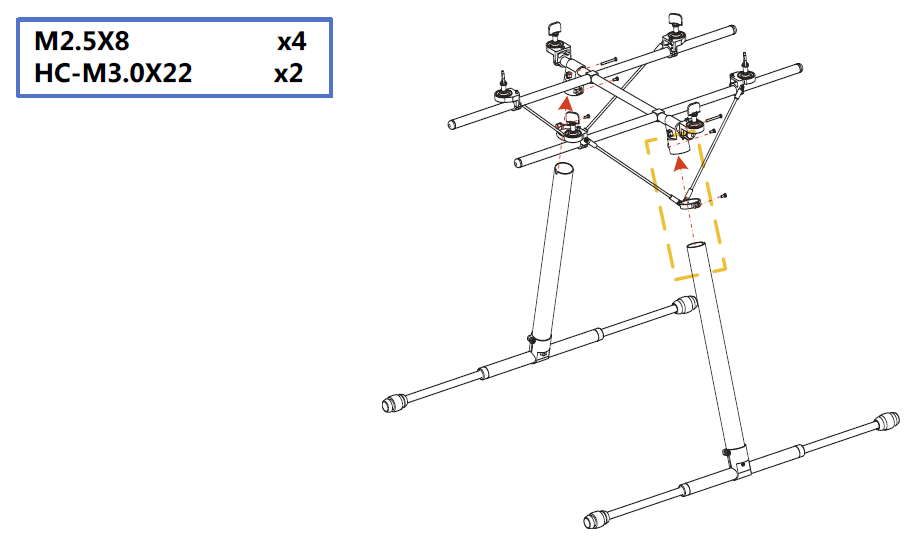
the screws which hold the mounting points for the two small struts on each leg of the gear are claimed to be M3.0x22 in the instructions. there's no way an M3.0 screw will fit in that hole.... is this a mistake in the instructions, or did i somehow mess it up? otherwise it all goes together just fine. it's the screw coming into the yellow dashed box from the right side in this illustration:
finally, is it considered better to attach a camera mount to the two bars at the tops of the legs (which are directly connected to the arms by the locking connectors) or to attach it directly to the bottom plate of the center frame? if the latter, would people advise making new holes or using a couple of the 19 which already exist to hold the two parts of the center together? they're pretty small threads and i'm not sure about supporting a heavy-ish load that way.
thanks in advance for any help... i did a quick search on the forum but didn't find anything obviously relevant.
i had to replace the connectors on the batteries with xt60s which i found at another local shop (the place i bought the gear was out of stock.) to run two batteries, i assume i'll need a y-adapter and also another battery tray? without a second tray, it seems strange that the standard battery tray puts such a heavy object so far off center. is that really OK!??! i'm also not clear what the preferred way to power the PMU is. another splice from the batteries?
the screws which hold the mounting points for the two small struts on each leg of the gear are claimed to be M3.0x22 in the instructions. there's no way an M3.0 screw will fit in that hole.... is this a mistake in the instructions, or did i somehow mess it up? otherwise it all goes together just fine. it's the screw coming into the yellow dashed box from the right side in this illustration:
finally, is it considered better to attach a camera mount to the two bars at the tops of the legs (which are directly connected to the arms by the locking connectors) or to attach it directly to the bottom plate of the center frame? if the latter, would people advise making new holes or using a couple of the 19 which already exist to hold the two parts of the center together? they're pretty small threads and i'm not sure about supporting a heavy-ish load that way.
thanks in advance for any help... i did a quick search on the forum but didn't find anything obviously relevant.


