Hi folks,
this is my first build thread here, I started it to make myself document my second heavy lifting project for AP work.
Components I will be using are following;
"Top part" of multirotor:
FC: Wookong M
Motors: Tiger MT3515-15 x8
ESC: KW60E x8
Distro board: Gryphone Distro board with dual BEC
Prop: Xoar 15x5 + 8mm to 6mm reduction x8
Battery: GensAce 10 000mAh 6S with EC5 connectors - already have few, will update my supplies as soon as we get maiden :tennis:
Tx/Rx: Graupner GR-16 paired with Graupner MX-20
LED set and other accessories..
Still thinking about adding 2.4GHz DJI Data link which I have (50 waypoints) and DJI iOSD since I have them at home but not sure if I really need them for start..
"Bottom part" of multirotor:
Gimbal: 3 axis cinestar style gimbal produced by us (Using 2 motors on each axis connected on 3 alexmos boards, every IMU from board is on its own axis for better results as seen on Flexacopter BDD - thank you Mario for idea :tennis")
FPV: 5.8GHz 500mW Boscam with Cloverleaf antenna
Tx/Rx: 2.4GHz Assan for camera guy
Frame:
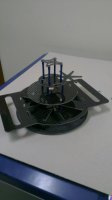
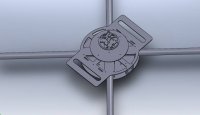
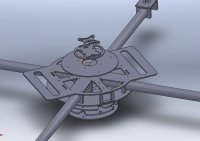
In house made! Yeah, we spent over few weeks to design frame for our X8. Good friend of mine is SolidWorks expert so I had chance to work with him and make ultimate frame designed specially for our components. You can see few screenshots of drawings, but take a note that these are not finals!
View attachment 13743
View attachment 13744
View attachment 13745
Some specifications of the frame: 25mm PA6 clamps, dual motor mounts made of alluminium, side battery try, bottom ESC and power distribution mount board (they are far far away from electronics - you can never know!), plate for IMU mounting, top plate for GPS mounting, 2 stage antivibration system using custom dumpening material, etc., etc...
This is it for the first post, we are starting our CNC router by the end of this week ( waiting for some parts to arrive :upset: ).. If I forgot something, will add it in the second part.
Greets to all from Croatia!
this is my first build thread here, I started it to make myself document my second heavy lifting project for AP work.
Components I will be using are following;
"Top part" of multirotor:
FC: Wookong M
Motors: Tiger MT3515-15 x8
ESC: KW60E x8
Distro board: Gryphone Distro board with dual BEC
Prop: Xoar 15x5 + 8mm to 6mm reduction x8
Battery: GensAce 10 000mAh 6S with EC5 connectors - already have few, will update my supplies as soon as we get maiden :tennis:
Tx/Rx: Graupner GR-16 paired with Graupner MX-20
LED set and other accessories..
Still thinking about adding 2.4GHz DJI Data link which I have (50 waypoints) and DJI iOSD since I have them at home but not sure if I really need them for start..
"Bottom part" of multirotor:
Gimbal: 3 axis cinestar style gimbal produced by us (Using 2 motors on each axis connected on 3 alexmos boards, every IMU from board is on its own axis for better results as seen on Flexacopter BDD - thank you Mario for idea :tennis
FPV: 5.8GHz 500mW Boscam with Cloverleaf antenna
Tx/Rx: 2.4GHz Assan for camera guy
Frame:
In house made! Yeah, we spent over few weeks to design frame for our X8. Good friend of mine is SolidWorks expert so I had chance to work with him and make ultimate frame designed specially for our components. You can see few screenshots of drawings, but take a note that these are not finals!
View attachment 13743
View attachment 13744
View attachment 13745
Some specifications of the frame: 25mm PA6 clamps, dual motor mounts made of alluminium, side battery try, bottom ESC and power distribution mount board (they are far far away from electronics - you can never know!), plate for IMU mounting, top plate for GPS mounting, 2 stage antivibration system using custom dumpening material, etc., etc...
This is it for the first post, we are starting our CNC router by the end of this week ( waiting for some parts to arrive :upset: ).. If I forgot something, will add it in the second part.
Greets to all from Croatia!
Attachments

Last edited by a moderator: