PeterLester
Member
I have some wobble in my custom 800 HEX MR while in light breeze and in Attitude or GPS mode.
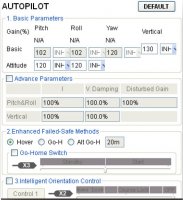
Which way do I adjust the pitch and roll parameters under the section "advanced parameters" as shown in the image below the basic parameter section?
This issue disappears when I am flying in manual mode.
DJI - does not provide details as to the range of values to be used and what they will do to the MR. Also I am yet able to adjust these variables remotely during actual flight so I need to be cautious. :dejection:
Adjustment of Basic and Attitude parameters will not fix this issue. The following is an image capture from the documentation and does not reflect values that I currently use.
View attachment 11526
Which way do I adjust the pitch and roll parameters under the section "advanced parameters" as shown in the image below the basic parameter section?
This issue disappears when I am flying in manual mode.
DJI - does not provide details as to the range of values to be used and what they will do to the MR. Also I am yet able to adjust these variables remotely during actual flight so I need to be cautious. :dejection:
Adjustment of Basic and Attitude parameters will not fix this issue. The following is an image capture from the documentation and does not reflect values that I currently use.
View attachment 11526